Элементы интеллекта роботов
Управление роботами сводится к автоматическому формированию и осуществлению целенаправленных движений в условиях неопределенности. Наряду с решением чисто двигательных задач робот должен уметь решать и задачи интеллектуальные. Уже сегодня имеется реальная потребность в адаптивных роботах с элементами искусственного интеллекта, обладающих способностью обучаться понятиям и распознавать классы объектов. Так, для речевого управления необходимо, чтобы робот мог распознавать отдельные фонемы или команды; для автономного функционирования в незнакомой обстановке робот должен распознавать препятствия и анализировать окружающую обстановку; для автоматической сборки изделий из деталей робот должен не только идентифицировать нужную деталь, но и определить ее местоположение и ориентацию. Кроме того, можно выделить способности робота к моделированию внешней среды, к логическому анализу сложных заданий, к планированию собственных действий и принятию решений. В ходе функционирования робота указанные элементы искусственного интеллекта тесно взаимодействуют и определяют режим работы системы управления движением, который можно назвать интеллектуальным.
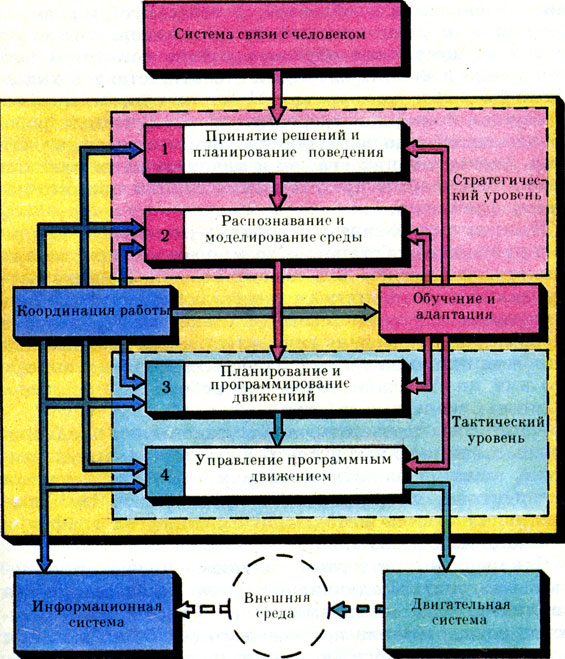
Многоуровневая иерархическая структура адаптивной системы управления робота с элементами искусственного интеллекта представлена на рис. на с. 117. Здесь выделены два главных уровня управления: стратегический и тактический. На первом уровне решаются задачи принятия решений и планирования поведения робота, а также задачи распознавания и моделирования внешней среды. На втором уровне осуществляется планирование и программирование движений робота (с учетом информации, заключенной в модели среды), а также синтезируются алгоритмы управления движением с сенсорной обратной связью.
Роботы рассматриваемого типа относятся к третьему поколению. Они предназначены для автономного функционирования в условиях, многие из которых могут быть неизвестны конструктору. Более того, эти условия могут существенно меняться в процессе выполнения роботом данных ему заданий. Поэтому весьма важное значение приобретают алгоритмические средства обучения и адаптации. Как видно из рис. на с. 116, эти средства должны использоваться на каждом уровне иерархии системы адаптивного управления. Только в этом случае можно гарантировать достижение роботом заданных целей в заранее неизвестных и меняющихся условиях.
Остановимся более подробно на том, какие функции возлагаются на отдельные элементы интеллекта роботов и каковы алгоритмы, обеспечивающие их работу. Прежде всего заметим, что общение робота с человеком осуществляется в режиме диалога через систему связи, включающую интеллектуальный интерфейс. Для формулировки роботу заданий человек обычно использует язык заданий, представляющий собой упрощенную версию естественного языка.
На первом уровне иерархической системы управления осуществляется планирование поведения робота и принятие соответствующих решений. Алгоритм этого уровня (обычно это логические алгоритмы поиска решений) на основе данного роботу задания, а также информации, получаемой от сенсорной системы и нижних уровней иерархии, строит план действий, который ведет к достижению цели. Далее последовательно принимают решения об отработке отдельных операций, реализующих "запланированное" поведение робота.
Элементы интеллекта роботов
На втором уровне иерархии осуществляется распознавание сигналов и объектов, а также формирование понятий и модели внешней среды. Алгоритмы этого уровня осуществляют обучение робота понятиям, распознавание и анализ ситуаций в соответствии с указаниями более высокого уровня. При этом существенно используется сенсорная информация. Полученные роботом знания обычно реализуются в форме семантических сетей, распознающих графов и адаптивных решающих правил. Эти формы представления знаний принято называть фреймами.
Процесс распознавания роботом сигналов и анализа окружающей обстановки во многих случаях может быть сведен к поиску логического вывода. По мере формирования новых понятий в памяти робота автоматически строится и уточняется модель внешней среды. Эта информационная модель используется для организации и проведения "мысленных экспериментов" по выбору того или иного плана поведения робота еще до совершения им реальных действий.
Алгоритмы третьего уровня осуществляют предварительное планирование и построение программных движений исполнительных механизмов робота с учетом конструктивных ограничений и препятствий. Здесь широко используются методы оптимизации на графах и вариационные методы.
Наконец, на четвертом (низшем) уровне синтезируются алгоритмы адаптивного управления приводами исполнительных механизмов. Они обеспечивают фактическое осуществление построенного (на более высоком уровне) программного движения при наличии динамических возмущений и факторов неопределенности.
Все перечисленные уровни иерархии функционально связаны между собой и с сенсорной системой робота. Их согласованная работа обеспечивается координатором. Интеллектом робота будем называть способность его системы управления решать задачи интеллектуального характера посредством целенаправленного преобразования сенсорной информации и знаний, накопленных в процессе обучения на опыте и адаптации к изменяющейся обстановке. Процесс обработки информации, направленный на решение роботом интеллектуальных задач, будем называть интеллектуальным управлением. Оно тесно связано с решением задач принятия решений, планирования поведения, формирования понятий, моделирования среды, логического анализа обстановки и распознавания ситуаций в условиях неопределенности.
Характерными чертами интеллекта робота, согласно данному определению, являются его способность к формированию и переработке знаний, обучению на опыте и адаптации к заранее неизвестным и изменяющимся условиям в процессе решения задач. Благодаря этим качествам робот может решать самые сложные и разнообразные задачи, а также легко перестраиваться с решения одного класса задач на другой.
Что же представляют собой элементы интеллекта роботов? Каковы их отличительные черты? В широком смысле это программно-аппаратные средства решения интеллектуальных задач, которые позволяют роботу выполнять операции, аналогичные функциям человека, занятого умственным трудом. Отличительным признаком интеллекта роботов является наличие баз данных и банков знаний, средств интерпретации и анализа задач, планирования их решений и принятия решений.
Адаптивные роботы с элементами искусственного интеллекта стали своеобразным символом современной научно-технической революции. На Международной выставке ЭКСПО-85 в Японии были продемонстрированы их уникальные способности. Один из таких роботов блестяще удерживал в равновесии волчок, раскрученный на острие самурайского меча. Другой робот, "играя" с листа на электронном органе, показал незаурядное исполнительское мастерство.
Робот-музыкант по своей конструкции напоминает человека и снабжен элементами интеллекта. Он имеет две механические руки с пятью пальцами каждая, корпус и две механические ноги. Общее число суставов (степеней подвижности) равно 50. На месте головы этого антропоморфного робота установлена телевизионная система зрения и распознавания нот, а также акустическая система распознавания команд человека и синтезатор речи.
Система адаптивного управления робота-музыканта имеет иерархическую структуру. На нижнем уровне этой системы осуществляется управление 50 микропроцессорами, встроенными в электроприводы суставов. На более высоких уровнях - автоматическое программирование и координация движения рук, пальцев, корпуса и ног в соответствии с планом игры, формируемым на основе распознавания и анализа нот. При этом учитывается не только содержание нотной записи, но и ключ произведения, тональность, темп и т. п.
На этой же выставке интеллектуальные возможности роботов продемонстрированы в получасовом шоу "Фантазия 2001 г". Финалом этого представления явился парад роботов. Прощаясь со зрителями, роботы назначали им свидание в 2001 г. Так фантастическое в мире роботов и искусственного интеллекта сегодня сливается с реальностью.
|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://informaticslib.ru/ 'Библиотека по информатике'