Чем дальше, тем быстрее (Глава пятая)

' - Где же мы будем копать? - спросил Гек.
- О, повсюду, в разных местах.
- Разве клады зарыты повсюду?
- Конечно, нет, Гек. Их зарывают либо на каком-нибудь острове, под самым концом какой-нибудь ветки старого сгнившего дерева, как раз в том месте, куда тень от ветки падает в полночь; но всего чаще - в подпольях таких домов, где водятся привидения'.
Как известно, затея Тома Сойера и Гека Финна на этот раз не завершилась успехом. Поэтому, нарушив традицию, мы не будем связывать с ними название этой главы, а скажем так: чем дальше, тем быстрее
- Но зачем же тогда такое вступление и причем здесь дома, в ко-торых водятся привидения?
- А вы еще не заметили?
- Что, собственно, не заметил?
- Неужели вы еще не заметили аналогию между копателями клада и швейной машиной?
Давайте разберемся подробнее. Как поступает кладоискатель? Он приходит к старому дереву, находит самую длинную ветку и ждет (т. е. остается неподвижным), пока не наступит полночь. Затем он подходит к месту, куда падает тень от конца йетки, и "начинает копать. Вряд ли стоит указывать, что в подавляющем большинстве случаев процесс циклически повторяется, если только кладоискатель не бросает свою затею после первой же неудачной попытки (Том и Гек повторяли).
Что, например, происходит с нитенатягивающим рычагом швейной машины? Он остается неподвижным, пока иголка не пройдет полный путь от верхнего до нижнего положения. Затем он опускается вниз и сразу же снова поднимается вверх. Затем этот процесс повторяется. Нечто подобное "можно сказать и о многих других узлах швейной машины, за исключением шпульного механизма, который вращается непрерывно. Аналогия, которую мы хотим здесь подчеркнуть, состоит в том, что как кладоискатели, так и механизмы швейной машины действуют по определенной программе. Задавая программу для каждого отдельного механизма, мы обеспечиваем их согласованную работу.
Настало время ответить на вопрос, который мы сформулировали в предыдущей главе: что же обеспечивает согласованную работу механизма или, говоря уже по-новому, что задает программу их действий? В швейной машине эту задачу выполняет так называемый главный вал, с которым связаны кулачки и кривошипы. Главный вал приводится в движение от электродвигателя. Работа кулачков и кривошипов общеизвестна, поэтому мы не станем вдаваться в подробности и отметим только - именно потому, что каждый отдельный механизм приводится в движение своим кулачком или кривошипом, а все кулачки или кривошипы связаны с одним и тем же валом, и обеспечивается согласованность работы механизмов. Каждый механизм вступает в действие точно в положенное время и совершает все предназначенные ему движения.
Теперь перенесемся мысленно в театральный зал на концерт знаменитого пианиста. Играя, пианист совершает очень много различных движений. Он совершает движения головой (относятся ли эти движения к делу, предоставим судить музыковедам), он совершает движения ногами, нажимая на педали (это уже ближе к цели), и, наконец, что самое главное, он совершает движения пальцами и кистями рук. Процесс исполнения грустного вальса Шопена или огнедышащего этюда Скрябина распадается в конечном итоге на множество элементарных движений.
Пианист ударяет по клавишам. Движение клавиши через довольно сложную систему рычагов передается молоточку. Молоточек бьет по струне, заставляет ее вибрировать. Вибрация струны рождает звук, т. е. опять-таки движение, на этот раз - воздуха.
Все начинается с движения клавиши. Исполнение музыкального произведения в целом - это согласованное движение клавиш. Но нельзя ли приспособить к клавишам рояля вал с кулачками и кривошипами точно так, как это делается в швейной машине? Можно, и это делалось неоднократно. Многочисленные конструкции подобного рода были весьма распространены в конце прошлого века, пока на смену им не пришел фонограф Эдисона. Можно-то можно, а вот эффект получается совсем не тот. Работа даже самого изощренного механизма не идет ни в какое сравнение с игрой талантливого пианиста. Почему? Этот вопрос вызывал и, по всей вероятности, еще долго будет вызывать яростные споры между физиками и лириками. Действительно, почему? Ведь современная техника позволяет воспроизвести движения гораздо более сложные, чем движения пальцев пианиста, и воспроизвести их с гораздо большей точностью, чем это делает сам пианист при повторном исполнении.
Дать исчерпывающий ответ на подобный вопрос равносильно тому, чтобы дать исчерпывающее объяснение понятию таланта, т. е. проверить алгеброй гармонию. Одно нам ясно - пианист отличается от механического исполнителя тем, что он слышит собственную игру. Человек, полностью лишенный слуха, не может быть талантливым пианистом.
На двух, даже очень похожих, роялях нужно по-разному ударить по клавише, чтобы получить один и тот же эффект. Поэтому только ощущая результат своих действий, пианист может достичь того, чего он хочет. Недаром рассказывают, что глухой Бетховен упирал конец палки в доску рояля, а второй конец этой палки брал в зубы.
Вернемся теперь с высот искусства на грешную землю. Приведем для начала небольшую цитату из книги Норберта Винера "Творец и робот"*: "Подверженный той лени, что является истинной матерью изобретений (от такой же лени другой мальчишка, работавший у машины Ньюкомена, прицепил как-то веревку от крана, впускавшего пар, к балансиру, создав тем самым первый автоматический клапан), гетевский ученик чародея запомнил отрывки подслушанных им заклинаний хозяина, произнес их и заставил метлу качать воду в бочку". Какую бездну размышлений рождает эта цитата! Мы обещаем читателю, что на страницах нашей книги еще рассмотрим вопрос о чародеях и их учениках и о лени - матери изобретений.
*(Норберт Винер, Творец и робот, М., "Прогресс", 1966")
Но уж коли была упомянута веревка, то в первую очередь наше внимание будет приковано, конечно, к ней. Прежде чем говорить о веревке, следует сказать несколько слов о работе паровой машины Ньюкомена. Как и современная паровая машина, машина Ньюкомена содержала цилиндр с перемещающемся в нем поршнем (рис. 19). Шток поршня соединялся с одним из концов коромысла, или балансира. Второй конец коромысла связывался с насосом, поднимавшим воду из угольной шахты.
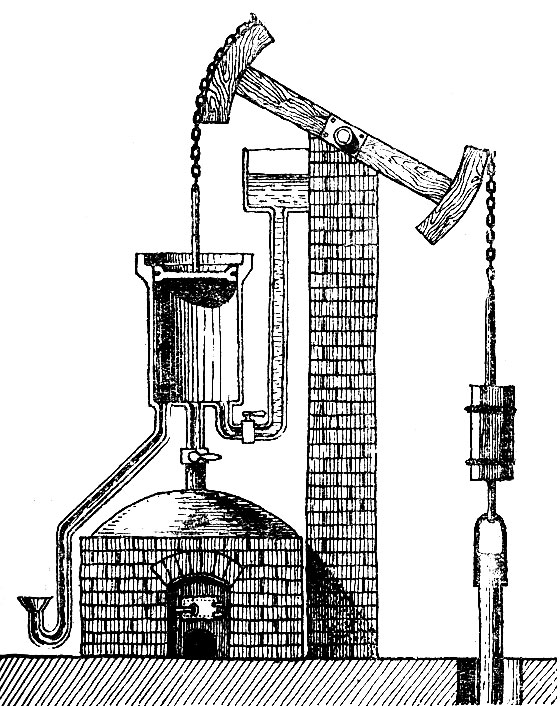
Рис. 19 Как и современная паровая машина, машина Ньюкомена содержала цилиндр с перемещающемся в нем поршнем
Рабочий объем цилиндра с помощью трубки, снабженной краном, соединялся с паровым котлом. Неотъемлемой частью машины Ньюкомена был рабочий низкой квалификации, обычно мальчишка, функции которого состояли в следующем. Когда конец коромысла, связанный со штоком поршня, перемещался в самое нижнее возможное положение, мальчишка открывал кран. Пар из парового котла поступал в цилиндр и начинал выталкивать поршень. Поднимаясь вверх, поршень через шток перемещал коромысло. Через коромысло движение передавалось штоку водяного насоса. Так продолжалось до тех пор, пока конец коромысла, связанный с поршнем, не приходил в верхнее положение, в этот момент мальчишка закрывал кран, связывающий рабочий объем цилиндра с паровым котлом. Оставшийся в цилиндре и затративший свою энергию на совершение механической работы пар конденсировался (для этой цели в цилиндр еще наливали холодную воду), и поршень под воздействием атмосферного давления начинал перемещаться вниз. Когда поршень занимал крайнее нижнее положение, мальчишка снова открывал кран и все повторялось сначала.
Сколь бы ни гневались на нас лирики, мы не можем не усмотреть здесь прямой аналогии с пианистом, играющим на рояле. Пианист слышит звуки, которые он извлекает из инструмента, и на основании того, что он слышит, корректирует свои действия. Мальчишка, приставленный к паровой машине Ньюкомена, видит положение коромысла и в соответствии с тем, что он видит, открывает или закрывает кран.
Но попробуйте простоять на одном месте в течение целого рабочего дня, выполняя столь однообразную и скучную работу! К тому же у мальчишки всегда есть свои мальчишечьи дела. И вот одному из таких мальчишек, говорят, его звали Генри Поттер, срочно понадобилось отлучиться. Чтобы не навлекать на себя гнев начальства, он взял веревку и привязал рукоятку крана к коромыслу. Так было осуществлено то, что сейчас принято называть обратной связью.
Не станем утверждать, что это случилось впервые, но факт остается фактом - машина продолжала работать, а человек перестал быть ее неотъемлемой составной частью. В современных паровых машинах механизм Генри Поттера остался практически без изменения. Только веревку заменили металлическим штоком, а кран с ручкой - парораспределительным механизмом, получившим название золотника. Поскольку у современных паровых машин, как правило, нет коромысла, шток золотника приводится в движение эксцентриком, укрепленным на валу маховика.
Прежде чем переходить к более подробному описанию свойств обратной связи, посмотрим, нет ли среди составных частей машины Ньюкомена наших старых знакомых. Ну, конечно же, есть! Поршень с цилиндром, подсоединенной к нему трубкой и краном - это типичный усилитель. Перемещение ручки крана, требующее затраты минимальных усилий (любой мальчишка может повернуть кран), сопровождается мощным перемещением поршня. Шток поршня, коромысло, шатун, кривошип и маховик - все это исполнительный механизм, преобразующий в данном случае возвратно-поступательное движение поршня во вращательное движение маховика. Глаз мальчика - это датчик, а его рука, протянутая к ручке крана, - линия связи.
Первое наблюдение, которое мы вправе сделать, состоит в том, что устройства, которые мы до сих пор рассматривали по отдельности, связаны здесь между собой, причем в совершенно определенной последовательности. Датчик через линию связи воздействует на усилитель, выход усилителя воздействует на исполнительный ме-ханизм.
Правда, нечто подобное мы уже наблюдали в ловушке для мамонтов. Но вспомним, что в ловушку попадались лишь очень глупые мамонты. Действительно, коснувшись лбом бамбукового шеста и переместив его настолько, что конец шеста перестал удерживать камень, мамонт приводил в действие механизм, который, начиная с этого момента, действовал уже по наперед заданной программе, причем данная программа не менялась, как бы ни вел себя в дальнейшем мамонт. Программа была простейшей и состояла в том, что камень падал вертикально вниз. Стоило мамонту, едва почувствовав прикосновение шеста ко лбу, отскочить в сторону, как затея с ловушкой теряла свое значение.
История не сохранила для нас данных, сумели ли мамонты выработать условный рефлекс на ловушки. Да и не в этом дело, важно другое. Если бы камень в своем полете мог изменять направление движения в соответствии с перемещением мамонта, ловушка действовала бы безотказно. Именно так обстоит дело в машине Ньюкомена: положение крана определяется положением коромысла. В рассмотренной нами последовательной цепи датчик воспринимает положение исполнительного механизма. В этом и заключена сущность обратной связи. Правда, в усовершенствованном варианте машины Ньюкомена одна и та же веревка выполняла функции и датчика и линии связи. Поистине неисчерпаемы возможности этой веревочки!
Сделанные нами наблюдения пока еще достаточно поверхностны. Мы установили, что поведение системы, состоящей из датчика, линии связи, усилителя и исполнительного механизма, определенным образом меняется, если датчик воспринимает положение исполнительного механизма. Другими словами, мы установили, что машина Ньюкомена, в известном смысле, совершеннее ловушки для мамонтов. Займемся теперь более углубленным изучением свойств обратной связи.
Прежде всего, несовершенство ловушки для мамонтов определяется не столько конструкцией самой ловушки, сколько поведением мамонта. Если бы мамонт спокойно продолжал шагать, невзирая на помеху в виде бамбукового шеста, ловушка действовала бы безотказно. Разовьем это чрезвычайно важное наблюдение. Что произошло бы с машиной Ньюкомена, если бы мальчик убежал, не привязав веревки? Предположим, что он сделал это сразу же после того, как открыл кран. В течение определенного промежутка времени, а именно до тех пор, пока поршень не достиг своего наивысшего положения, отсутствие мальчика никак не сказалось бы на работе машины. Только после достижения поршнем наивысшей точки начинаются отклонения от нормального рабочего процесса. Пар, продолжающий поступать в цилиндр, стремится удержать поршень в верхнем положении, а инерция маховика стремится переместить его вниз. В результате машина останавливается, но, повторяем еще раз, это происходит только после того, как поршень достигнет наивысшей точки.
Сказанное приводит нас к чрезвычайно интересному выводу. Оказывается, обратная связь нужна не всегда, точнее, она бездействует, пока работа системы происходит в точном соответствии с некоторым заранее намеченным планом. Малейшее отклонение от такого плана - и обратная связь становится необходимой. Таким образом, мы снова приходим к понятию плана, или программы работы системы. Можем сказать и больше. В системе с обратной связью датчик должен воспринимать не столько положение исполнительного механизма, сколько различие между его истинным положением и тем, которое диктуется на данный момент времени планом, или программой. Чтобы сделать последнее положение более ясным, рассмотрим еще одно усовершенствование паровой машины, придуманное на сей раз Джемсом Уаттом.
Разберем принцип действия регулятора Уатта (рис. 20). Регулятор Уатта состоит из двух грузиков, укрепленных на качающихся рычагах. Рычаги укреплены на валу, причем этот вал связан передачей или просто представляет собой продолжение вала паровой машины. Под действием силы тяжести, а также под действием пружины грузы стремятся занять наинизшее положение, которое, очевидно, достигается тогда, когда оба груза прижаты к валу. При вращении вала под действием центробежной силы грузы стремятся разойтись в стороны, приподнимая при этом конец рычага, соединенного с заслонкой. Каждому значению скорости вращения вала соответствует строго определенное положение грузов, когда центробежная сила полностью уравновешивает силу веса и силу пружины. Каждому положению грузов в свою очередь соответствует определенное положение заслонки в трубе, подводящей пар к цилиндрам паровой машины. План, или программа, состоит в данном случае в том, чтобы скорость вращения вала оставалась постоянной. Если так оно и есть на самом деле, постоянным остается положение грузов, постоянным остается и положение заслонки. Весь только что описанный механизм как бы отсутствует, во всяком случае, его наличие никак не сказывается на работе машины.
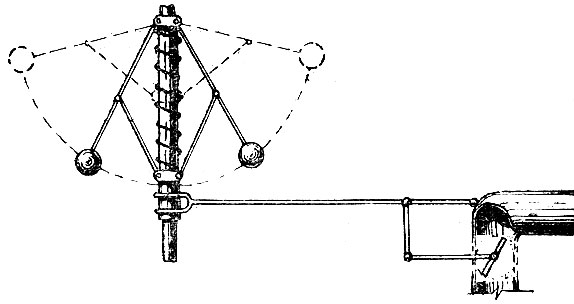
Рис. 20 Регулятор Уатта
Предположим теперь, что по какой-либо причине, например в результате уменьшения нагрузки, скорость машины увеличилась. Увеличение скорости приводит к тому, что грузы расходятся в стороны, конец рычага поднимается и заслонка в трубе, подводящей пар, поворачивается таким образом, что проходное сечение становится меньше. Поступление пара в машину уменьшается, и это естественным образом влечет за собой уменьшение скорости машины. После того как скорость уменьшится, грузы опускаются вниз.
Пока скорость (регулируемый параметр) остается постоянной, наличие регулятора никак не сказывается на работе системы. Стоило Скорости измениться или, иначе говоря, стоило значению регулируемого параметра оказаться не равным некоторому значению, предусмотренному программой, регулятор приходит в действие, причем это действие направлено на восстановление требуемого значения регулируемого параметра.
Конструкция регулятора Уатта позволяет нам сделать еще одно наблюдение. Увеличение скорости вала всегда влечет за собой закрывание заслонки, т. е. уменьшение количества подаваемого пара. Рассмотрев работу конструкции, показанной на рис. 20, легко сделать и другой вывод. Если бы скорость вала уменьшилась, грузы опустились бы вниз и это повлекло бы за собой открывание заслонки, сопровождающееся увеличением количества подаваемого пара.
Регулятор Уатта вместе с паровой машиной, к которой он подсоединен - это снова знакомая нам система. Грузы, шарнирно укрепленные на вращающемся валу, представляют собой датчик - в данном случае датчик скорости. Тот, кто еще не забыл содержания второй главы, легко обнаружит, что в данном случае датчик выполняет функцию измерения и функцию преобразования. Скорость вала npeобразуется в центробежную силу, эта сила сравнивается с силой веса груза и давления пружины - таким образом осуществляется измерение. С помощью шарнирного механизма измеренная величина скорости преобразуется в механическое перемещение. Перемещение с помощью линии связи (рычаг) передается к усилителю (заслонка - цилиндр - поршень), а перемещение, реализуемое на выходе усилителя, с помощью кривошипношатунного механизма (исполнительный механизм) преобразуется во вращательное движение вала. Скорость вращения вала вызывает отклонение груза.
Итак, перед нами снова замкнутая система с обратной связью от исполнительного механизма к датчику. Важное новое наблюдение, которое мы сделали, рассматривая работу регулятора Уатта, состоит в том, что увеличение скорости сопровождается уменьшением подачи пара и наоборот. Иными словами, обратная связь работает таким образом, чтобы противодействовать причине, вызвавшей отклонение. Такая обратная связь называется отрицательной. Именно отрицательная обратная связь позволяет осуществить регулирование работы системы.
Чтобы последнее утверждение стало более очевидным, рассмотрим другую конструкцию регулятора, показанную на рис. 21. Из сравнения рис. 20 и 21 видно, что изображенные на них конструкции почти полностью идентичны. Они совпадают во всех деталях с единственным маленьким исключением - заслонка на рис. 21 повернута на 90° относительно положения заслонки, изображенного на рис. 20, Посмотрим, к чему же приведет столь незначительное, на первый взгляд, изменение. Предположим вначале, точно так же, как мы это делали в предыдущем случае, что скорость вала остается постоянной. Грузы также занимают постоянное положение относительно вала, заслонка неподвижна и, следовательно, как и в предыдущем случае, наличие регулятора пока не сказывается на работе системы. Казалось бы, ничто не изменилось. Но не будем торопиться с выводами.
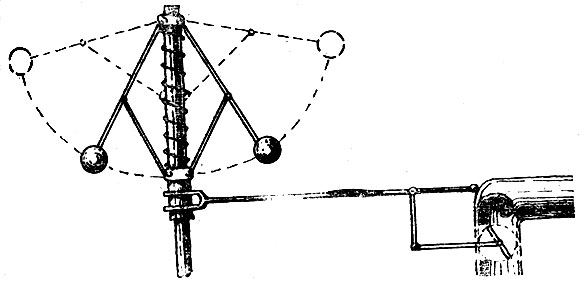
Рис. 21 Регулятор Уатта
Пусть, как и в предыдущем случае, по какой-то причине скорость вращения вала слегка увеличивается. Грузы расходятся в стороны, конец рычага поднимается и это влечет за собой открывание заслонки. Но при открывании заслонки количество подаваемого пара увеличивается. Это влечет за собой еще большее повышение скорости, грузы расходятся еще дальше - заслонка открывается еще больше. Как говорят, машина пошла вразнос. Процесс увеличения скорости закончится только тогда, когда рычаги с грузами займут горизонтальное положение.
Наоборот, если скорость вращения вала по какой-либо причине слегка уменьшается, это влечет за собой закрывание заслонки, а следовательно, уменьшение подачи пара. Процесс будет продолжаться вплоть до полной остановки машины.
Легко заметить, что обратная связь в данном случае положительна, т. е. работа регулятора не противодействует, а напротив, способствует причине, вызвавшей первоначальное отклонение. Из проведенного выше анализа видно, что положительная обратная связь действует во всех отношениях противоположно отрицательной обратной связи. Она отнюдь не способствует сохранению значения регулируемого параметра постоянным. В системе с положительной обратной связью регулируемый параметр может сохранять предписанное ему значение только до тех пор, пока полностью отсутствуют причины, вызывающие его малейшее отклонение. Но так не бывает, причина всегда найдется. Поэтому мы сделаем окончательное заключение: в системе с положительной обратной связью регулируемый параметр может принимать только некоторое граничное значение. В рассмотренной системе такими граничными значениями оказываются либо нулевая, либо максимально возможная скорость. Хорошо еще, что действие регулятора прекращается, когда рычаги с грузами занимают горизонтальное положение. В противном случае скорость увеличивалась бы безгранично, а это неизбежно привело бы к катастрофе, что, кстати, случается на практике.
Таким образом, изменяя знак обратной связи, а это, как мы наблюдали, очень просто сделать, во всяком случае в регуляторе Уат. та, мы получаем два противоположных эффекта. Отрицательная обратная связь стремится удержать регулируемый параметр как можно более близким к заданному значению, т. е. стабилизирует систему, а положительная обратная связь, напротив, делает систему еще более чувствительной к малейшим отклонениям. В третьей главе мы с успехом использовали положительную обратную связь именно с целью увеличения чувствительности системы к отклонениям или, как мы тогда говорили, с целью увеличения коэффициента усиления. В этой главе мы рассматриваем только отрицательную обратную связь, свойства которой далеко не исчерпываются сказанным выше.
Конструкция регулятора Уатта, показанная на рис 20, общеизвестна, более того, описание регулятора мы заимствовали из учебника физики для средней школы*, сделав его лишь чуть более пространным. В учебнике, в частности, говорится следующее: "Всякое изменение числа оборотов вала машины влечет за собой изменение количества пара, поступающего в цилиндр машины. Благодаря этому вал машины вращается с постоянным числом оборотов."
*(А. В. Перышкин. Курс физики, часть вторая изд. 15-е, М., "Просвещение", 1968.)
Посмотрим, так ли уж справедливо последнее утверждение. Выясним сначала, что необходимо для постоянства скорости вращения вала паровой машины. Мы все время молчаливо предполагали, что паровая машина действует не вхолостую, а выполняет полезную работу. Иными словами, определенное количество энергии передается от паровой машины в нагрузку. Количество энергии, отдаваемое в нагрузку в единицу времени, прямо пропорционально скорости вращения вала.
В паровую машину энергия поступает вместе с нагретым паром. Часть энергии рассеивается в виде тепловых потерь, а часть преобразуется в механическую энергию и передается в нагрузку. Количество энергии, поступающей в паровую машину в единицу времени, прямо пропорционально количеству пара, также поступающего в единицу времени, конечно, при условии, что давление пара и его температура остаются постоянными. Последнее условие мы будем считать всегда выполненным.
Количество пара, поступающего в паровую машину, целиком определяется положением заслонки. Следовательно, если заслонка неподвижна, а давление и температура пара постоянны, то положение заслонки однозначно определяет количество энергии, поступающей в паровую машину в единицу времени. Если при этом и нагрузка не меняется, то за единицу времени в ней расходуется постоянное количество энергии и на тепловые потери расходуется постоянное количество энергии, причем сумма израсходованной энергии всегда в точности равна количеству поступившей энергии. Говорят, что система находится в состоянии равновесия. Состояние равновесия, в частности, определяет постоянство скорости вращения вала. Таким образом, мы снова, на этот раз из энергетических соображений, приходим к тому же самому выводу, что если положение заслонки не изменяется и нагрузка паровой машины постоянна, то скорость также остается постоянной и для этого не требуется никакой обратной связи.
Предположим теперь, как мы это делали выше, что нагрузка паровой машины уменьшилась, потому что, например, отключилась часть потребителей. Количество энергии, расходуемой в нагрузке в единицу времени, уменьшилось, но количество энергии, поступающей в паровую машину, остается тем же самым. Равновесие нарушилось, и скорость вращения вала неизбежно должна увеличиться, что и происходит на самом деле. Единственная возможность установить прежнее значение скорости вращения вала состоит в том, чтобы уменьшить количество поступающей энергии, т. е. изменить положение заслонки. Это и делает регулятор Уатта.
Но положение заслонки в регуляторе Уатта в свою очередь определяется скоростью вращения вала, и изменить положение заслонки можно, лишь изменив скорость вала. Отсюда очевидный вывод: регулятор Уатта не дает возможности установить прежнее значение скорости после изменения нагрузки. Новое состояние равновесия может быть достигнуто только при другом значении скорости, так как процесс регулирования неизбежно связан с изменением положения заслонки.
Запишем теперь все сказанное в виде уравнения. Обозначим через а угол поворота заслонки и через Р количество энергии, потребляемой в нагрузке в единицу времени. Согласно всему сказанному выше скорость вращения вала машины (обозначим ее буквой υ) будет тем больше, чем шире открыта заслонка и чем меньше энергии потребляет нагрузка. Иными словами:
где k1 и k2 постоянные коэффициенты.
Если угол поворота заслонки а постоянен, то скорость вращения вала v однозначно определяется величиной нагрузки. Так и происходит в машине, лишенной регулятора Уатта.
Введем теперь регулятор, т. е. предлоположим, что

где k 3 - постоянный коэффициент, зависящий, вообще говоря, от отношения плеч рычага, передающего движение от датчика к заслонке на рис. 20. Знак минус указывает на то, что обратная связь отрицательна.
Решая два выведенных выше уравнения совместно, получим:
Эта формула еще раз подтверждает сказанное. Наличие регулятора Уатта не делает величину скорости независимой от величины нагрузки, а лишь уменьшает эту зависимость в (1+k1k3) раз. Точно к такому же выводу мы пришли бы, если бы предположили, что нагрузка постоянна, а изменяется, например, температура пара, его давление или какой-либо другой параметр системы.
Постоянные коэффициенты k1 и k2 целиком определяются конструкцией паровой машины, причем коэффициент k1 есть не что иное, как коэффициент усиления, поскольку сама машина представляет собой усилитель. Коэффициент k3, напротив, полностью определяется конструкцией регулятора.
Попробуем использовать это обстоятельство для усовершенствования регулятора Уатта и рассмотрим конструкцию, показанную на рис. 22. Эта конструкция снова почти полностью совпадает с предыдущей. Единственное отличие заключается в конструкции рычага. Ясно, что чем больше длина плеча АВ, тем больше величина коэффициента k3. Рассуждая иначе - чем больше длина плеча АВ, тем меньше должно изменяться положение грузов для достижения того же самого изменения положения заслонки; чем больше длина плеча АВ, тем меньше зависимость скорости вращения вала от величины нагрузки. Однако чем больше длина плеча АВ, тем 0одьщее усилие нужно приложить, для того чтобы переместить рычаг. Рычаг вместе с заслонкой, как и всякая механическая система, неизменно содержит трущиеся части, и для перемещения рычага необходимо преодолеть силу трения.
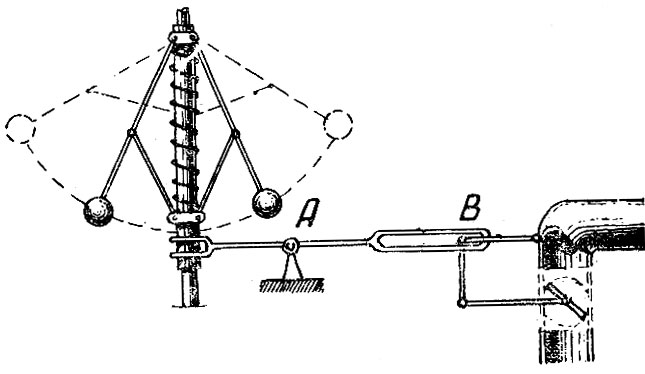
Рис. 22 Регулятор Уатта
Таким образом, кроме тех сил, которые мы до сих пор рассматривали, изучая работу регулятора Уатта: центробежной силы, силы веса и силы давления пружины, необходимо учитывать еще силу трения, которая тем больше, чем больше длина рычага АВ, т. е. чем больше коэффициент k3. Эта дополнительная сила также приведет к изменению положения груза и в конечном итоге - к изменению скорости вращения вала. Следовательно, предложенная нами новая конструкция регулятора Уатта позволяет уменьшить зависимость скорости от нагрузки лишь до определенных пределов, т. е. до тех пор, пока величина силы трения не станет сравнимой с другими силами, определяющими положение грузов.
Правда, и из этого положения есть выход. Для того чтобы уменьшить трение, можно смазать части регулятора ... мылом? Ну, раз уж речь идет о паровой машине, давайте вместо мыла воспользуемся машинным маслом, заметив, однако, что мыло, незаслуженно забытое в предыдущей главе, снова заняло достойное место на страницах нашего повествования.
Обобщим теперь все сказанное нами. Прежде всего для правильного понимания принципа действия отрицательной обратной связи нам понадобилось ввести два новых чрезвычайно важных понятия. Это, во-первых, понятие программы, или плана, работы системы и, во-вторых, понятие влияния внешней среды, которое в нашем случае сводилось к изменению нагрузки.
Заменим теперь, как мы это с успехом делали в предыдущих главах, отдельные части паровой машины черными ящиками. В результате получается схема, показанная на рис. 23. Паровую машину вместе с пароподводящей трубой и заслонкой мы заменили черным ящиком, обозначенным буковой У (усилитель). Входной величиной этого ящика является угол поворота заслонки α, а выходной - скорость движения поршня u. Исполнительный механизм мы тоже заменили черным ящиком, обозначенным буквой И. На входе этого черного ящика действует уже отмеченная величина u, а на выходе - скорость вращения вала υ. Нагрузку мы изображаем в виде черного ящика, обозначенного буквой Н. Этот ящик не имеет выхода. Иными словами, мы предполагаем, что вся энергия, подводимая к нагрузке, целиком расходуется ею самою. Это предположение в общем случае, конечно, неверно, но нас интересует не столько сама нагрузка, сколько ее возможные изменения. Кроме того, в понятии "нагрузка" мы как бы обобщаем все внешние силы, действующие на систему. Величина скорости вращения вала по цепи обратной связи, обозначенной буквами ОС, передается на вход системы и с помощью датчика, обозначенного буквой Д, сравнивается (измеряется) с некоторой величиной, представляющей собой план, или программу работы системы. Эту величину мы обозначили буквой α0.
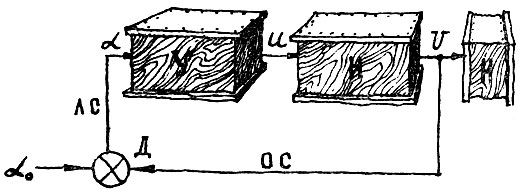
Рис. 23 Заменим отдельные части паровой машины черными ящиками
На выходе датчика образуется величина, пропорциональная разности между истинным и заданным значениями скорости. Эта величина по линии связи передается на вход усилителя, причем она численно равна углу поворота заслонки α,
До сих пор мы все время считали, что план работы паровой машины состоит в том, чтобы поддерживать скорость постоянной, поэтому величину α0 мы тоже считали постоянной. Однако легко сообразить, что все сказанное выше остается справедливым, если скорость не остается постоянной, а должна изменяться со временем по какому-либо закону. Меняя вес или расположение грузов в регуляторе Уатта, мы легко достигнем такого изменения скорости.
Теперь самое главное. Работа системы на рис. 23 подчиняется законам, которые мы сформулировали выше как словесно, так и в виде уравнения, независимо от того, что на самом деле представляют собой ее главные составные части, т. е. усилитель, исполнительный механизм, датчик и линия связи. Так, роль усилителя вместо паровой машины может играть электронный, пневматический, гидравлический усилитель или же, наконец, описанный нами кабестан. То же самое относится и к исполнительному механизму, роль которого может, в частности, выполнять механическое приспособление для игры на рояле, и к остальным частям схемы. От каждого из черных ящиков требуется единственно, чтобы их работа подчинялась одним и тем же законам, т. е., например, чтобы величина выхода оказывалась пропорциональной величине входа. В предыдущих главах мы потратили довольно много усилий, демонстрируя то обстоятельство, что подобные условия удовлетворяются для чрезвычайно широкого ряда различных искусственных и естественных систем.
Сделаем еще одно замечание. Читатель, наверное, давно уже заметил странное пристрастие авторов к ловушкам для мамонтов, кабестанам, паровым машинам и тому подобным древностям. Уместно ли уделять так много внимания паровой машине на страницах книги, посвященной одной из самых молодых наук - кибернетике? На наш взгляд, уместно. Гораздо проще представить себе движение заслонки в трубе, подводящей пар, чем тончайшие молекулярные процессы, происходящие в кристалле транзистора или мышце живого организма. Еще одно обстоятельство - машина Ньюкомена даже после того, как Генри Поттер соединил веревкой кран с коромыслом, не стала предметом изучения науки кибернетики, хотя бы по той причине, что сама кибернетика появилась через 250 лет после описанных в этой книге событий. Более того, сейчас, как и 250 лет тому назад, паровые машины с регуляторами и без регуляторов изучаются в рамках науки термодинамики, а их использование относится к области техники, называемой энергетикой.
Кибернетика изучает только те процессы, а именно процессы управления, которые являются общими и для паровых машин, и для ловушек для мамонтов, и для живых организмов, и для сверхсовременных автоматических устройств. Назначение кибернетики в том и состоит, чтобы, изучив закономерности процессов на достаточно простом и доступном примере, использовать затем полученные знания при конструировании более сложных и тонких систем. Подобный прием называется моделированием и составляет одну из главных методологических основ современной кибернетики. О моделировании и моделях речь пойдет еще впереди, а пока мы ограничимся лишь тем, что назовем систему, показанную на рис. 23, моделью регулятора Уатта. Эта система в равной степени может служить моделью любого другого физического устройства, состоящего из изображенных на рис. 23 частей, охваченных цепью отрицательной обратной связи. Система на рис. 23 получила название системы автоматического регулирования или, короче, П-регулятора. Буква П означает, что в системе осуществляется пропорциональное регулирование, а это в свою очередь значит, что управляющее воздействие а пропорционально разности между фактическим значением регулируемого параметра v и его заданным значением α0. Свойства П-регулятора вкратце таковы:
1) пока внешние воздействия не влияют на работу системы (нагрузка постоянна), значение регулируемого параметра v в точности равно заданному и наличие обратной связи никак не влияет на работу системы;
2) наличие цепи отрицательной обратной связи уменьшает зависимость регулируемого параметра от внешних воздействий (изменение нагрузки) в (1+k1k3) раз;
3) подобное уменьшение не может быть безграничным хотя бы из-за присущих любой физическби системе трения и аналогичных ему явлений. Ниже мы увидим, что существуют и другие ограничения на величину k1k3.
Такие П-регуляторы часто встречаются в живых организмах. Например, лягушка, охотясь за комаром, определяет расстояние до него на глаз (разность между фактическим и желаемым положениями) и затем, прыгая, делает так, чтобы мускульные усилия при прыжке оказались пропорциональными величине расстояния.
Модель, показанная на рис. 23, в равной степени применима и к пианисту. Роль усилителя играют в данном случае мускулы предплечий и кистей рук, роль исполнительного механизма - сложная система, включающая в свой состав пальцы, клавиши и рычаги, передающие движение клавиш молоточкам. Воздействие внешней среды состоит в том, что пальцы устают, а рычаги клавиш обязательно имеют люфты и, кроме того, изнашиваются со временем. Датчиком служат уши пианиста, причем услышанный им звук (регулируемый параметр) сравнивается с планом. Результат сравнения определяет сигналы, посылаемые по нервной системе (линия связи) к мышцам пальцев. Но есть здесь и существенное различие. В отличие от паровой машины план в данном случае не задается извне, а хранится в голове пианиста, если, конечно, это талантливый пианист. Игра бездарного исполнителя, слепо следующего лишь тому, что написано в нотах (план, задаваемый извне), мало чем отличается от игры механического приспособления.
Модель системы автоматического регулирования позволяет провести и гораздо более далеко идущие аналогии. Но остается один вопрос: неужели нельзя все же сделать так, чтобы регулируемый параметр оказался полностью независимым от внешних условий? Или, другими словами, нельзя ли построить такой регулятор, который поддерживал бы скорость вращения паровой машины в точности, а не приближенно постоянной? Чтобы ответить на этот вопрос, попробуем внести в регулятор Уатта еще одно усовершенствование. Рассмотрим систему, изображенную на рис. 24. Многие детали этой системы нам уже хорошо знакомы, но появилось здесь и нечто новое. Новой деталью является цилиндр с поршнем и золотником, к слову сказать, в точности такой же, как и цилиндр самой паровой машины. Шток поршня связан с заслонкой, а шток золотника - с центробежным регулятором. Питается этот цилиндр от того же котла, что и сама машина. Посмотрим, как работает подобная система.
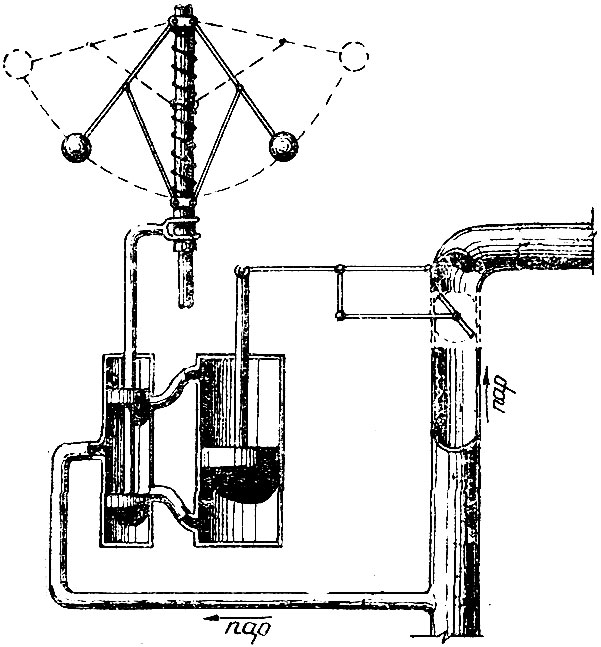
Рис. 24 Усовершенствованный регулятор Уатта
Пока скорость вращения вала остается равной заданному значению, золотник располагается в среднем положении. Пар с одинаковой силой давит с обеих сторон поршня, и поршень, а следовательно, и заслонка остаются неподвижными. Снова, пока нет отклонения регулируемого параметра, регулятор не оказывает никакого воздействия на работу системы. Предположим, что скорость вращения несколько увеличивается. Грузы расходятся в стороны, золотник перемещается вверх и пар поступает теперь лишь с одной стороны цилиндра. Ясно, что в такой ситуации поршень приходит в движение и движется вниз до тех пор, пока давление пара с обеих его сторон снова "не становится одинаковым. Такое положение наступает лишь тогда, когда золотник принимает свое прежнее положение, а это возможно только при достижении прежнего значения скорости. Значит, в нашей новой системе после изменения нагрузки (мы по-прежнему считаем, что именно изменение нагрузки было причиной изменения скорости) равновесие наступает при другом положении заслонки, но при прежнем значении скорости.
Попробуем представить себе теперь закон функционирования черного ящика, который мог бы служить моделью только что описанного цилиндра с поршнем. Достаточно очевидно, что входом такого черного ящика должно служить перемещение золотника (обозначим его буквой x), а выходом - перемещение поршня y. Пока золотник находится точно в среднем положении (обозначим это положение золотника буквой x0), поршень неподвижен. Весьма существенно здесь то, что само положение поршня совершенно безразлично. Он может находиться при этом в любой части цилиндра (начальное положение поршня обозначим буквой у0). Пусть теперь золотник смещается, например, вверх и занимает новое положение, соответствующее перемещению золотника, равному x1. Поршень приходит в движение, однако величина, на которую перемещается поршень, в дальнейшем уже не зависит от положения золотника. Когда золотник занимает положение, соответствующее перемещению штока x1, поршень движется с постоянной скоростью, пока не упрется в стенку цилиндра. Предположим, что цилиндр достаточно длинен и поршень никогда не доходит до своих крайних положений. А вот скорость движения поршня, очевидно, будет зависеть от положения золотника. Чем больше перемещение x1, тем в большей степени открыто отверстие золотника, тем больше пара поступает в цилиндр, тем выше скорость поршня.
Из сказанного следует, что черный ящик, моделирующий поведение цилиндра с поршнем и золотником, обладает следующими свойствами: а) выходная величина в каждый момент времени практически не зависит от входной величины, точнее, она определяется всей историей изменения входной величины, начиная с некоторого "нулевого" момента времени; б) скорость изменения выходной величины прямо пропорциональна входной величине. Но если нам известна скорость изменения некоторой величины и значение ее в начальный момент времени, то мы можем определить значение этой величины в любой момент времени с помощью интегрирования. Это дйет нам возможность написать
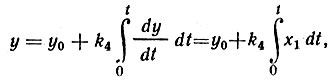
где k4 - снова постоянный коэффициент.
Тот, кто не любит интегралов, может разобраться в работе механизма на основании приведенного выше словесного объяснения. Мы упомянули интеграл лишь для того, чтобы сказать, что черный ящик, моделирующий работу цилиндра с поршнем и золотником, а также многих других подобных им механизмов, получил название интегрирующего звена.
Составим теперь полную модель всей системы, изображенной на рис. 24. Она выглядит так, как показано на рис. 25. Новым по сравнению с рис. 23 является лишь наличие интегрирующего звена Ин. Система подобного типа получила название И-регулятора, причем объяснять, откуда взялась в этом названии буква И, уже нет надобности. Этот И-регулятор в отличие от П-регулятора может заставить регулируемый параметр в точности следовать заданному плану изменений.
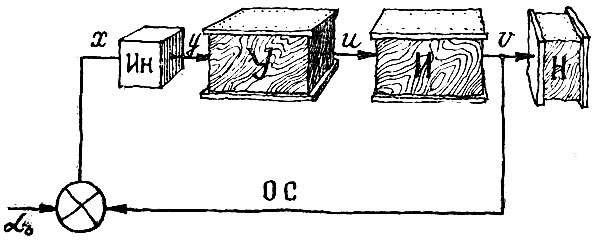
Рис. 25 Полная модель усовершенствованного регулятора Уатта
Но зачем было рассматривать П-регуляторы со всеми их недостатками, если известно, как эти недостатки устранить, неужели все дело только в непонятном пристрастии авторов к древностям? Ответ на этот вопрос приводит нас к рассмотрению нового понятия - понятия устойчивости. Посмотрим еще раз внимательно на регулятор Уатта в его "первозданном" виде, т. е. на рис. 20. Не встретит ли здесь читатель еще кого-нибудь из своих старых знакомых, хотя, может быть, и не упомянутых еще на страницах этой книги? Конечно, да. Ведь груз, укрепленный на рычаге, способном свободно качаться на шарнире, - это обыкновенный маятник. Правда, маятник несколько своеобразный, поскольку в данном случае кроме силы веса на него действует еще и центробежная сила, и поэтому в состоянии равновесия рычаг несколько отклонен от вертикали. Однако он сохраняет все свойства маятника. В частности, испытав толчок, он начинает совершать колебания относительно положения равновесия. Благодаря наличию сил трения колебания будут постепенно затухать, как и в обычном маятнике.
Посмотрим, что произойдет, если мы подтолкнем грузы регулятора Уатта, например, вниз. Как было сказано выше, это приведет к открыванию заслонки и увеличению подачи пара. Увеличение подачи пара вызовет увеличение скорости вращения вала паровой машины, и, таким образом, сила, стремящаяся вернуть маятник в положение равновесия (в нашем случае это центробежная сила), увеличится. Когда маятник перейдет в положение равновесия и качнется в противоположную сторону, заслонка закроется и скорость вращения вала уменьшится. Это снова приведет к увеличению силы, стремящейся вернуть маятник в положение равновесия.
Сказанное как будто свидетельствует о том, что колебания рычага регулятора Уатта под воздействием отрицательной обратной связи должны затухать быстрее, чем при отсутствии такой связи, поскольку каждый раз возникает дополнительная сила, стремящаяся вернуть рычаг в положение равновесия. Действительно, одно из свойств отрицательной обратной связи состоит в том, что она всегда стремится успокоить (стабилизировать) всякие непроизвольные движения, возникшие в системе. Но в данном конкретном случае не будем торопиться с выводами. Вспомним, что у паровой машины имеется еще и маховик.
Всем известно, что вал с маховиком не может изменить свою скорость мгновенно даже под воздействием достаточно больших усилий. Собственно, маховик в паровой машине для того и нужен, чтобы скорость вращения вала оставалась постоянной в те моменты, когда поршень находится в крайних положениях и усилия, воздействующие на кривошип отсутствуют. Поэтому на увеличение скорости вращения вала после дополнительного открывания заслонки требуется определенное время. Предположим, что в рассматриваемом случае это время в точности равно половине периода колебаний рычага регулятора, т. е. времени, в течение которого груз переходит из одного крайнего положения в другое. Посмотрим, что тогда произойдет. Пусть мы снова отклонили грузы регулятора вниз от положения равновесия. Заслонка открылась, пар стал поступать в машину более интенсивно и создались условия для увеличения скорости вращения вала. Но вал с маховиком раскручивается медленно и скорость достигает своего нового значения как раз к тому моменту, когда грузы регулятора уже переходят положение равновесия и оказываются в противоположном крайнем положении. Возросшая в результате увеличения скорости центробежная сила стремится не вернуть грузы в положение равновесия, а, наоборот, отклонить их еще дальше. Дальнейшее отклонение грузов сопровождается все большим закрыванием заслонки - создаются условия для уменьшения скорости. И скорость действительно начинает уменьшаться, однако опять не сразу. Минимального значения скорость достигает как раз тогда, когда грузы регулятора снова минуют положение равновесия и приходят в крайнее нижнее положение. Малое значение скорости вращения вала опять-таки приводит к тому, что уменьшение центробежной силы как бы поощряет колебания рычагов с грузами.
Следовательно, наличие в системе маховика приводит к тому, что возникают силы, не препятствующие, а способствующие колебаниям рычагов с грузами. Если эти силы достаточно велики, а в конечном итоге, как это нетрудно сообразить, величина их определяется коэффициентом k1 то однажды начавшись, колебания рычагов с грузами не только не затухнут, а напротив, размах их будет все более и более увеличиваться. В такт с колебаниями регулятора изменяется и скорость вращения вала, что, конечно, совершенно недопустимо.
Один из важных выводов, который мы можем сейчас сделать, следующий. Если П-регулятор, показанный на рис. 23, содержит инерционные элементы, подобные маховику (а такие элементы присутствуют во всех без исключения физических системах), то устойчивая работа возможна лишь до определенных значений коэффициента k1. Стоит превысить это значение, и в системе возникают колебания, подобные описанным выше. Это и есть то дополнительное ограничение на величину произведения k1k3 о котором мы говорили ранее на стр. 71.
Еще хуже обстоит дело в И-регуляторе, изображенном на рис. 25. Вспомним, что закон функционирования интегрирующего звена гласит, что на изменение выходной величины интегрирующего звена (перемещение поршня в цилиндре) требуется определенное время. Достаточно этому времени хотя бы приблизительно совпасть с половиной периода колебаний рычагов регулятора, как возникает уже описан ная картина нарастающих колебаний, на этот раз уже без всякого участия маховика. Наличие маховика лишь усугубляет эффект. По этой причине И-регуляторы оказываются устойчивыми лишь в весьма узком диапазоне допустимых изменений параметров и поэтому практически не используются.
Снова возникает вопрос: какой смысл описывать систему, которая никогда не используется на практике? Ответ достаточно прост, Мы знаем секрет, как исправить положение.
Рассмотрим маховик, точнее, не весь маховик, а лишь небольшую часть его обода. Предположим, что в этом ободе проделано небольшое углубление и в этом углублении покоится грузик, растянутый двумя пружинками, как показано на рис. 26. Пока скорость вращения маховика остается постоянной, иными словами, пока маховик не испытывает ускорений, грузик неподвижен относительно маховика и расположен точно посередине углубления. Стоит только скорости хоть немного изменить свое значение, как грузик немедленно переместится. При ускорении он перемещается в направлении, противоположном направлению вращения маховика, а при замедлении - в том же направлении, в каком вращается маховик. Величина отклонения грузика пропорциональна величине ускорения, как это следует из первого закона Ньютона.
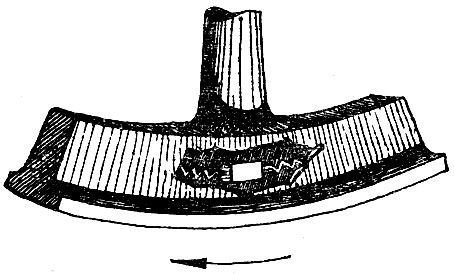
Рис. 26 Маховик: в ободе проделано небольшое углубление и в этом углублении покоится грузик, растянутый двумя пружинками
Посмотрим, что произойдет, если мы сделаем отклонение заслонки регулятора Уатта пропорциональным отклонению грузика. Вопрос о том, как передать перемещение грузика к заслонке, оставим в стороне. Это можно сделать, например, точно так же, как во второй главе мы преобразовывали перемещение поплавка в бензобаке в перемещение стрелки указателя на приборной доске. Важно другое, теперь заслонка будет отклонена не тогда, когда уже изменилась скорость, а как только создадутся условия для изменения скорости, т. е. когда возникнет ускорение. Повторив рассуждения, проведенные выше, читатель легко убедится, что подобная система стремится подавлять колебания рычага с грузом так же, как тогда, когда мы еще не рассматривали влияния маховика.
Черный ящик, моделирующий поведение грузика, расположенного в ободе маховика, работает следующим образом. Его выходной величиной является перемещение (грузика), а входной - ускорение маховика, т. е. скорость изменения скорости вращения или, в более общем случае, скорость изменения регулируемого параметра. Но скорость изменения величины есть производная этой величины по времени. Следовательно, наш новый черный ящик обладает тем свойством, что его выходная величина пропорциональна производной от входной величины по времени. В формульной записи это выглядит так:
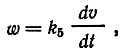
где k5 - постоянный коэффициент.
Этот черный ящик получил название дифференцирующего звена.
Рассмотрим систему, показанную на рис. 27. Она получила название Д-регулятора, который всегда устойчив, во всяком случае, в том смысле, что в нем не возникают колебания регулируемого параметра. Но, к сожалению, он к тому же совершенно неработоспособен. Действительно, управляющее воздействие на вход усилителя подается только тогда, когда регулируемый параметр изменяется. Если же регулируемый параметр имеет постоянное значение, регулирующее воздействие на выходе Д-звена полностью отсутствует и, следовательно, система работает так, как если бы у нее вообще не было никакого регулятора.
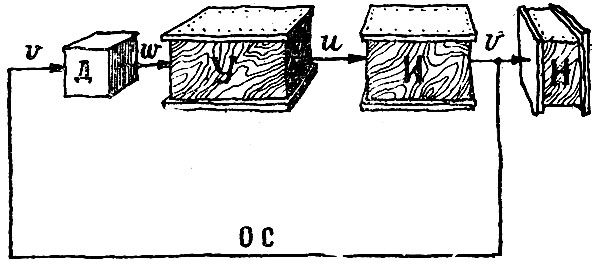
Рис. 27 Д-регулятор, который всегда устойчив, во всяком случае, в том смысле, что в нем не возникают колебания регулируемого параметра
Мы рассмотрели три различных типа регуляторов. Первый из них, П-регулятор, обладает, как говорят, неустранимой систематической погрешностью. Иными словами, регулируемый параметр в нем в каждый момент времени может безнаказанно отклоняться от заданного значения на определенную величину, называемую также статизмом регулятора. Попытки уменьшить эту величину за счет увеличения коэффициента усиления, как мы теперь знаем, приводят к возникновению колебаний.
В И-регуляторе отсутствует систематическая погрешность (статизм), но зато во всех случаях, представляющих практический интерес, он оказывается принципиально неустойчивым.
Наконец, Д-регулятор представляет собой полную противоположность И-регулятору. Он всегда устойчив, но зато отклонение регулируемого параметра от заданной величины может достигать здесь тех же самых значений, каких оно достигало бы при отсутствии всякого регулятора.
Где же выход из создавшегося положения? Ну, конечно же, нужно объединить принципы действия трех регуляторов в одной конструкции. В результате мы приходим к системе, изображенной на рис. 28. Величина, пропорциональная разности между заданным значением (планом) и фактическим значением регулируемого параметра, поступает на вход интегрирующего звена. Выходные величины интегрирующего и дифференцирующего звеньев складываются с самой величиной разности, и полученная таким образом сумма трех величин поступает на вход усилителя. Подобная система получила название ПИД-регулятора.
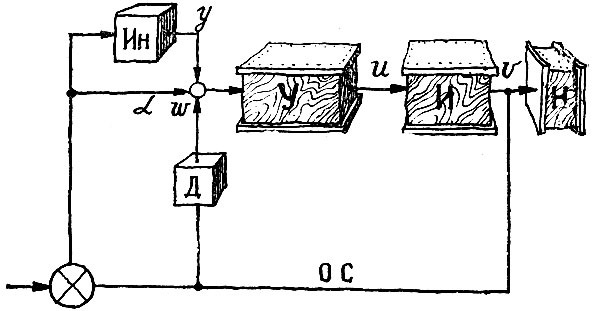
Рис. 28 ПИД-регулятор: выходные величины интегрирующего и дифференцирующего звеньев складываются с самой величиной разности, и полученная таким образом сумма трех величин поступает на вход усилителя
В ПИД-регуляторе главную роль играет та часть суммы величин, поступающих на вход усилителя, которая пропорциональна отклонению. Иными словами, в основном ПИД-регулятор работает как П-регулятор. Выходной сигнал интегрирующего звена относительно мал. Он используется только для того, чтобы "выбирать" ошибку, оставшуюся после того, как П-регулятор закончил свою работу. Наконец, выходной сигнал дифференцирующего звена возникает лишь в моменты изменения регулируемого параметра и служит для того, чтобы гасить возникающие колебания.
К сожалению, не одни только маховики обладают инерцией - не чуждо это свойство и человеческому мышлению. Поэтому чтобы дать читателю время "переварить" все сведения, полученные в этой главе, приглашаем его на небольшую загородную прогулку. Вы сидите за рулем автомобиля, мчащегося по прямому, как стрела, шоссе. Но вот автомобиль слегка отклонился вправо от намеченного вами курса и оказался в опасной близости от обочины. Не медля ни секунды, вы поворачиваете руль влево и держите его в таком положении до тех пор, пока не достигнуто исходное положение. Теперь надо повернуть руль в исходное положение, но ведь на это требуется время, и пока вы крутите баранку, автомобиль заметно отклоняется влево. Вы продолжаете крутить баранку вправо и, лишь достигнув намеченной для себя невидимой линии курса, начинаете возвращать ее в положение "прямо". Но на это опять требуется время, и снова заметное отклонение автомобиля вправо.
Не надо слишком сильно нажимать на акселератор, иначе подобный эксперимент может закончиться очень и очень плохо. Но даже и на малой скорости автомобиль выписывает на шоссе хорошо знакомую всем начинающим автоводителям синусоиду. Опытный шофер никогда не поступает так, как было только что описано. Он начинает возвращать баранку в исходное положение задолго до того, как автомобиль достигнет намеченной линии курса. Умение определить момент, когда начать поворачивать баранку, приходит вместе с опытом. Приходит с опытом и другое - у шофера-профессионала скорость, с которой он вращает баранку, пропорциональна отклонению автомобиля от линии курса.
Отсюда поразительный вывод - человек, впервые севший за руль, ведет себя, как И-регулятор. Это совершенно естественно, в своем повседневном опыте он имеет дело в подавляющем большинстве с неподвижными объектами и привык перемещать объект, например, когда ставит чашку на блюдце, до тех пор, пока этот объект не займет в точности предназначенного ему положения.
Садясь за руль автомобиля, человек становится звеном более сложной системы. Он видит положение автомобиля и осуществляет регулирующее воздействие, вращая баранку. Но затем вступают в действие усилитель (двигатель автомобиля) и колеса (исполнительный механизм). Обучаясь вождению автомобиля, человек как бы "выращивает" в себе пропорциональное и дифференцирующее звенья и благодаря этому приобретает свойства ПИД-регулятора.
Интересно, что способности человека быть регулятором могут оказаться нарушенными в результате различных болезней или просто усталости. Дрожание рук - суть не что иное, как колебание, возникающие в результате плохого регулирования. Это обстоятельство было подмечено еще Норбертом Винером.
Однако мы уже поговорили об автомобилях и, следовательно, пора заканчивать эту и без того затянувшуюся главу.
|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://informaticslib.ru/ 'Библиотека по информатике'