Робот с электронным "мозгом"
Представьте себе электронную вычислительную машину, например БЭСМ, но с одной существенной особенностью. Ею управляет человек, а не управляющее устройство. Он внимательно следит за ходом вычислительного процесса, нажимая кнопки, посылает команды в блоки машины и контролирует их выполнение.
Если человек начнет управлять электронной машиной, она превратится в тихоходный арифмометр
- Явная нелепость, - скажет каждый.
Такое вмешательство человека в "личную жизнь" автоматической машины приведет к тому, что она из быстродействующей превратится в тихоходный арифмометр. Не помогут ни скоростной арифметический блок, ни бешено вращающийся магнитный барабан, ни быстроходные входные и выходные устройства. Работу высокоскоростного оборудования будет задерживать человек. Производительность машины станет равной производительности оператора.
Все это верно. И тем не менее подобная ситуация возникает не только в воображении, но и в действительности. Человек - управляющее устройство - все чаще становится узким местом при автоматизации производственных процессов. Он слишком медлителен для управления системой скоростных механизмов и агрегатов.
Удивительный, неисчерпаемый в своем разнообразии мир машин, аппаратов и приборов окружает теперь человека. Безостановочно днем и ночью вращаются миллионы колес, движутся в равномерном ритме бесчисленные рычаги, включаются и выключаются сотни миллионов реле, по многим тысячам километров проводов проносится электрический ток.
Они снабжают нас энергией, добывают полезные ископаемые, строят новые машины, обрабатывают землю, с огромной скоростью переносят нас из конца в конец страны, кормят, одевают нас и строят наши жилища.
И человек контролирует работу машин. Неотступно и внимательно он следит за всеми ее действиями, устраняет все, что мешает нормальному протеканию производственного процесса.
Десятки приборов информируют его о давлении и температуре в герметически закрытых аппаратах, о размерах деталей, с огромной скоростью изготавливаемых станком-автоматом, о составе газа внутри доменной печи - обо всем, что должен знать человек, ведущий напряженную борьбу за высокое качество и производительность.
Машина освободила мышцы человека от чрезмерной нагрузки, но не его интеллект. Мозг и нервы живого организма и физическая мощь машины соединены невидимыми, но прочными связями.
Эта система человек-машина все время находится в движении, в мельчайшие доли секунды в ней что-то как-то изменяется.
Параметры технологического процесса - температура, давление, состав сырья, топлива, размеры обрабатываемого изделия, скорости движения механизмов - меняются иногда быстрее, иногда медленнее, то закономерно, то в силу каких-то непредвиденных случайных обстоятельств. Меняются и внешние условия, в которых идет процесс. Непрерывным потоком идут к человеку сигналы от агрегатов и приборов, контролирующих протекание процессов. Малейшее отклонение от нормы вызывает реакцию со стороны живого "управляющего устройства".
Неожиданно подскочила температура резца в токарном автомате. Нужно немедленно принять меры - привести ее к норме, иначе неизбежен брак.
Что сделать? Уменьшить величину подачи или скорость резания? Или увеличить охлаждение? Что приведет к лучшему результату?
От быстроты реакции рабочего или мастера, умения правильно выбрать наилучший способ управления зависит качество продукции, эффективность и экономичность производственного процесса.
Опытный, квалифицированный мастер знает заранее, как пойдет процесс, если возникнет какое-нибудь отклонение от нормы. Ему не приходится долго раздумывать. При первом же сигнале он примет необходимые меры, не ожидая, пока появится брак.
Но техника быстро совершенствуется. Повышается быстроходность машин и агрегатов, появляется новая технология, требующая огромных давлений и температур, повышается скорость обработки сырья. И человек зачастую не может справиться с ответственными, многосторонними обязанностями "управляющего устройства".
Его движения недостаточно быстры, органы восприятия недостаточно чувствительны. Даже глаз, самый мощный из органов чувств, не в состоянии отличить друг от друга более пяти сменяющихся в секунду предметов. А производительность скоростного многопозиционного автомата часто превосходит этот предел.
На самолетной приборной доске вспыхнула сигнальная лампочка, и тотчас же рука пилота легла на штурвал управления. Всего четверть секунды потребовалось для реакции тренированного человека. Но за это время сверхскоростной реактивный самолет пролетит 150 метров.
За четверть секунды современный ротационный агрегат выпустит полсотни экземпляров газет, мощный прокатный стан выдаст тонны проката, сернокислотная установка выработает десятки килограммов серной кислоты.
Быстрота реакции - скорость срабатывания - человека зависит от многих обстоятельств: тренированности, сложности действия, состояния нервной системы, степени утомления. Но она имеет предел, который ограничивает возможности человека в управлении быстропротекающими процессами.
Обсуждая разные примеры, характеризующие недостаточную быстроту реакции человека, мы из многих невольно выбрали смешной. Это рассказ А. П. Чехова "Налим".
Нет нужды напоминать хорошо известную историю ловли налима, спрятавшегося под корягу. Налим, как известно, был пойман, его уже держали за жабры, но он неожиданно выскользнул. "Все растопыривают руки, но уже поздно: налима - поминай как звали", - написал Чехов-художник. А по-научному это звучит так: реакция любителей налимьей печенки на внезапно изменившуюся ситуацию оказалась недостаточно быстрой.
При медленной реакции в управлении сложными процессами неизбежен брак, потеря производительности, а иногда и авария.
Вот почему все чаще возникает необходимость в автоматах, заменяющих внимание человека, его опыт и квалификацию при управлении производством.
Но для этого нужна машина, способная реагировать на малейшие изменения внешних условий, способная "разумно" взаимодействовать с окружающей средой, ориентироваться в различных ситуациях, поддерживать постоянный контакт с целой системой агрегатов.
Эта механическая 'кошка' безразлична к явлениям внешнего мира
Можно ли создать такую машину-автомат высшего типа?
Мы подошли к одной из важнейших научно-технических проблем. Теперь речь идет уже не только о вычислительных машинах или системах, перерабатывающих один набор символов в другой - пусть более организованный, претендующий даже на литературное или музыкальное произведение.
Речь идет о машинах, непосредственно участвующих в создании материальных ценностей, самостоятельно управляющих реальными производственными процессами, машинах, строящих другие, быть может себе подобные. Поставлен вопрос о создании автоматов, приспосабливающихся к среде, в которой они существуют, способных "обучаться" и "совершенствоваться".
Не торопите нас с ответом. Он будет дан. Точнее, вы сами на него ответите. Но не сразу.
Перед нами одно из "чудес" XVIII века - механическая кошка. Под блестящим пушистым мехом спрятан замысловатый часовой механизм. Повинуясь заведенной пружине, кошка движется по комнате туда, где ярко горит в печке огонь, качает головой и даже мурлычет. Совсем как живая!
Нестерпимым становится жар пылающего огня, уже дымится мех, покрывающий автоматическую игрушку. Но ее это не тревожит. Она безразлична к явлениям внешнего мира. Такова программа ее действий, диктуемая механизмом.
А настоящая живая кошка далеко не безразлична к внешней среде. Вот она лежит на почтительном расстоянии от огня, наслаждаясь теплом. Внезапно огонь в печке стал жарче. Немедленно последует реакция кошки. Она отодвинется ровно настолько, насколько необходимо для восстановления прежнего приятного для нее состояния. Уменьшится огонь - кошка придвинется ближе к печке.
Как же вложить в безжизненный автомат способность хотя бы к такому элементарному взаимодействию с внешним миром? Оказ&вается, это сделать не трудно.
На внешней поверхности автомата устанавливается электрический термометр и настраивается на определенную температуру, например приятную живой кошке. Когда температура изменится, прибор начнет вырабатывать электрические сигналы. Они попадут в механизм, передвигающий автомат, и "кошка" будет приближаться или удаляться от печки. А как только температура станет нормальной - она остановится.
В этой системе входным чувствительным элементом является термометр, выходным исполнительным органом - двигатель автомата. Когда автомат перемещается, вместе с ним перемещается и термометр. Выход системы связан со входом обратной связью. Ее назвали так в отличие от прямой связи, передающей сигналы от входа к выходу.
Обратные связи играют огромную роль во всех современных автоматических системах. Они-то и придают автоматам способность активно взаимодействовать с внешней средой.
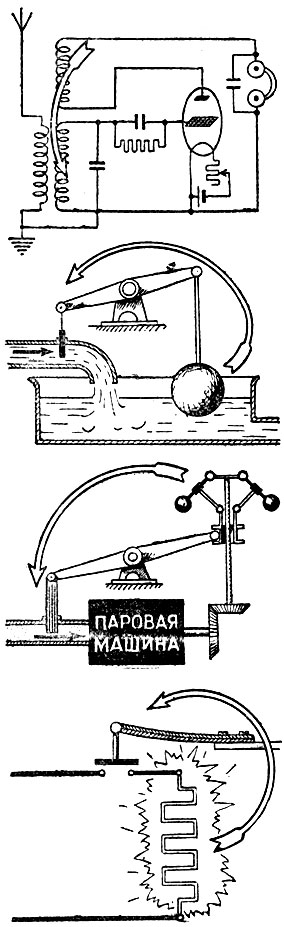
Первый из известных нам механизмов с обратной связью описан в книге итальянского инженера Рамелли, изданной в 1588 году. Механизм управлял работой водяной мельницы.
Скорость вращения мельничных жерновов зависит от количества поступающей воды и от твердости засыпаемых зерен. Но чем больше скорость, тем больше зерна может обработать мельница, и наоборот, чем ниже скорость, тем меньше зерна должно в нее поступать.
Для автоматического регулирования подачи зерна придумали очень простое, но остроумное приспособление. Зерно подается в мельницу по наклонному желобу. Он прижат к граненой муфте, насаженной на вертикальный вал жернова.
Когда скорость жерновов возрастает, муфта чаще трясет желоб - зерно начинает сыпаться быстрее. Вал начал вращаться медленнее - муфта реже ударяет по желобу, и поступление зерна уменьшается.
Таким образом, между подачей зерна и вращением жерновов существует не только прямая, но и обратная связь. Подача зерна влияет на вращение жерновов, и обратно - их вращение влияет на подачу зерна.
Два с половиной века назад в одной из английских шахт для откачки воды была впервые установлена паровая машина, построенная кузнецом Томасом Ньюкоменом.

Обратная связь в действии
Она была очень примитивна. К цилиндру с поршнем вели две трубы: одна от парового котла, другая от бака с холодной водой. Сначала открывали кран первой трубы, пар посту пал в цилиндр, и поршень поднимался вверх. Затем этот кран закрывали и открывали кран второй трубы. В цилиндр поступала холодная вода, пар сгущался, и давление падало. Поршень опускался вниз. Вновь открывали первый кран, и поршень опять шел вверх, и так все повторялось много раз.
Несложную работу o открывания и закрывания кранов обычно выполняли мальчики. Существует легенда, что один из них, Гемфри Поттер, утомленный этой скучной и однообразной работой, нашел способ от нее избавиться. Он соединил веревочками рукоятки кранов со штоком, на котором укреплен поршень, и машина сама начала открывать и закрывать краны и управлять своим движением благодаря обратным связям, которые смышленый мальчик осуществил посредством веревочек.

Первый из известных механизмов с обратной связью
Когда машина Ньюкомена испортилась, ее отправили на ремонт к Джемсу Уатту. Талантливый механик обратил внимание на крайнюю ее примитивность. После упорной работы он построил более совершенную паровую машину, с центробежным регулятором скорости. Регулятор приводится во вращение от работы вала машины. В зависимости от числа оборотов вала шары регулятора под действием центробежных сил расходятся то больше, то меньше. С ними соединена подвижная муфта. Через систему рычагов она передвигает задвижку трубы, подводящей в машину пар.
Регулятор настраивается на заданное число оборотов вала. Если почему-либо скорость вала увеличилась, шары разойдутся и потянут муфту вверх - задвижка опустится. В машину начнет поступать меньше пара, и число оборотов вала снизится до нормы.
Если, наоборот, вал начал вращаться медленнее, чем нужно, регулятор поднимет задвижку, и поступление пара в машину увеличится, увеличится до нормы и число оборотов вала.
В этой системе автоматического регулирования паровая регулятора машина является управляемым объектом, а регулятор - управляющим устройством. Через систему рычагов и задвижку - прямую связь - регулятор посылает объекту сигнал управления. А через вертикальный валик - обратную связь - регулятор получает от машины сигнал о результате своего управляющего действия.
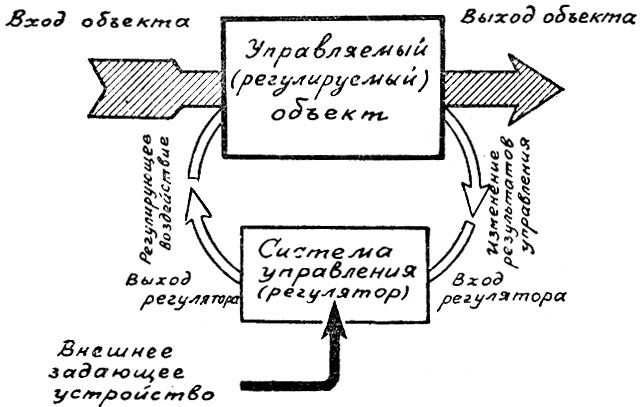
Типовая схема управления с обратной связью
Трудно назвать какую-либо область техники, где ни нашло бы применения автоматическое регулирование. Регуляторы температуры поддерживают нужную температуру, регуляторы давления - заданное давление, регуляторы скорости - требуемое число оборотов вала, регуляторы напряжения - постоянство напряжения.
Вспомните наш рассказ о сложном динамическом процессе - полете самолета. И здесь система автоматического регулирования помогает человеку.
Автоматический пилот настроен на определенный курс. Неожиданный порыв ветра, и самолет отклонился от заданного направления. Тотчас же к автопилоту от курсоуказателя идут сигналы - "курс отклонился от нормы". И от автопилота к рулям начинают поступать сигналы управления. Рули поворачиваются, и самолет послушно возвращается на заданный курс. Прямая и обратная связи обеспечивают взаимодействие автопилота с самолетом.
Можно без конца приводить примеры разнообразных систем автоматического регулирования. Они различны по конструкции, принципу действия и назначению. Но взаимодействие между управляющим устройством - регулятором и управляемым объектом однотипно. Регулятор, настроенный на определенный режим, при его нарушении посылает сигнал управления, а обратная связь доставляет регуляторам сигналы о результате управляющего действия.
Обратные связи в технике
А как быть, если в ходе технологического процессса нужно, чтобы температура, давление, скорость или какой-либо иной фактор менялись по определенному закону? Можно ли обеспечить автоматическое выполнение такого переменного режима работы управляемого объекта?
Конечно, можно! Для этого нужно задать управляющему устройству программу изменения процесса, а с помощью обратных связей обеспечить ее точное выполнение при любых условиях.
Такие системы с предписанной программой действия и обратными связями существуют уже давно. В 1950 году группа советских ученых, а затем и зарубежные ученые построили на этом принципе автоматически управляемые металлорежущие станки. В них управляющее устройство "читает" программу, вырабатывает соответствующие сигналы и посылает их в механизмы движения инструмента - исполнительные органы станка. Система автоматического контроля все время сравнивает полученные размеры детали с заданными. По цепям обратной связи идут сигналы об отклонениях, возникающих из-за износа инструмента, неточности станка и других случайных обстоятельств.
Управляющее устройство, реагируя на эти сигналы, вносит поправки в движение инструмента. Изделие получается очень точным, ошибки при изготозлении не превышают нескольких микронов.
'Кошка' с электронным мозгом 'сообразит', что лучше всего прикрыть дверцу печки
Станок с программным управлением - первый шаг на пути создания автомата высшего типа. Этому роботу не приходится "раздумывать" над выбором наилучшего способу управления процессом обработки детали. Все сделал за него человек. Возникло отклонение в размере обрабатываемой детали - обратная связь вызовет дополнительное перемещение инструмента. Реакция робота на отклонение строго предопределена. Способ устранения ошибки указан. Автомат работает по принципу "делай так, и только так".
Попробуем теперь подняться на следующий, более высокий уровень организации робота. Отправным пунктом в наших рассуждениях выберем снова печку.
Предположим, что возле нее сидит не кошка, а человек. Его реакция на изменение температуры может быть более разнообразной, чем у кошки. Ведь кошке ничего другого не остается, как отодвинуться или придвинуться к огню. Только таким способом она в состоянии поддерживать приятную для себя температуру.
А человек может добиться этого разными способами: либо прикрыть или открыть дверцу печки, либо уменьшить или увеличить огонь, регулируя подачу топлива, либо придвигаясь к печке или отодвигаясь от нее. Выбор того или иного варианта поддержания температуры будет зависеть от многих обстоятельств. Возможно, человек примет во внимание среднюю температуру в комнате, силу тяги в дымоходе, количество имеющегося топлдаа или еще какце-либо соображения. Оценив всевозможные варианты, он примет тот, который сочтет наилучшим.
Hq мы уже знаем, что и электронная вычислительная машина способна к выбору наилучшего варианта по критериям, указанным ей человеком в программе. Эту задачу она решает чрезвычайно быстро. Придадим ей исполнительные органу и устройство для измерения температуры. При ее колебании в машину поступят сигналы, закодированные на понятном для нее "языке". И вычислительная машина приступит к обследованию различных вариантов реакции на изменившиеся внешние условия.
Наконец наилучший вариант выбран, и серия командных сигналов, выработанных машиной, поступит в исполнительные органы-двигатели. Автомат либо передвинется, либо изменит положение дверцы печки, либо отрегулирует подачу топлива.
Робот с электронным "мозгом" способен работать по принципу: "Сначала обдумай, а потом делай". Такой робот может самостоятельно управлять сложным технологическим процессом.
Представьте себе современный цементный завод. Здесь механизированы операции загрузки и выгрузки вращающейся печи, в которой обжигается цемент, действуют десятки контрольно-измерительных приборов и регуляторов. Они поддерживают заданную температуру, влажность и другие параметры. Но если один из них изменится, то это повлияет на весь процесс. Так, например, снижение калорийности топлива приведет к снижению температуры в печи и вместе с тем к повышению влажности. Если не изменить режим работы печи, качество продукции может значительно ухудшиться.
Но устранить отклонение в протекании процесса можно разными способами: уменьшить скорость вращения печи и тем самым увеличить время обжига, или уменьшить подачу сырья, или одновременно сделать и то и другое. Возникает сложная задача управления - ее выполняет человек. Оценив обстановку, мастер примет тот или иной вариант, который на основе своего многолетнего опыта и квалификации он сочтет наилучшим.
То же самое может сделать робот с электронным "мозгом". Точные математические зависимости заменят ему опыт и квалификацию мастера. Правильно указанный критерий определит выбор оптимального варианта. Исполнительные органы - двигатели и следящие системы - выполнят указания электронного "мозга".
Но для этого человек должен установить математические зависимости между параметрами процесса, составить алгоритм управления и дать точную формулировку критерия. Для сложных процессов это пока в полной мере сделать не удалось. Но на отдельных участках управления робот уже с успехом заменяет человека. А в более простых случаях управление целиком поручается машине.
При въезде на одну из оживленнейших магистралей Москвы внимание водителей автомашин привлекает надпись: "Зеленая волна, скорость 40 километров в час".
Автомобилям, соблюдающим указанную скорость, не приходится задерживаться у многочисленных светофоров, расположенных вдоль магистрали. Волну автомашин каждый светофор встречает зеленым светом. Управление светофорами происходит по жесткой программе. Их переключает через указанные промежутки времени часовой механизм.
Этот автомат действует, не считаясь с тем, что происходит на мостовой. И очень часто приветливый зеленый огонек светится на свободной от транспорта стороне перекрестка, в то время как ненавистный водителям красный задерживает шеренги автомашин, подъезжающих к нему слева и справа. Опытный регулировщик внимательно следит за ситуацией у перекрестка и старается свести к минимуму общее время ожидания транспорта.
Робот регулирует уличное движение еще оперативнее. Он учитывает время прихода автомашин на перекресток, число автомобилей, движущихся к нему в том или ином направлении, и в зависимости от этих и других обстоятельств переключает светофор.
Четкие, "разумные" действия автоматов-регулировщиков намного повышают скорость движения транспорта, особенно в часы пик.
Еще более сложную работу выполняет автомат, управляющий приемом и отправкой самолетов. Робот-диспетчер учитывает время вылета отбывающих самолетов, условия прибытия самолетов в район аэропорта, устанавливает очередность их посадки и даже принимает на себя управление взлетом и посадкой самолетов, освобождая от этих обязанностей летчиков.
Робот способен управлять и движением машин на автостраде, обеспечивая безопасность езды по ней без шоферов. Если впереди идет автомобиль с меньшей скоростью, то задний автоматически его обгоняет. Автомат управляет также въездом и выездом автомашин с автострады.
Примеров уже спроектированных и работающих управляющих автоматов можно привести много.
Исправный автомат всегда работает хорошо. Он неутомим, не отвлекается посторонними делами, действует эффективно и безошибочно. Вместе с тем роботу с электронным "мозгом" можно придать способность к "юбученик". Для этого нужно снабдить его программой обучения, и он будет действовать по принципу: "Сначала научись, а потом делай".
Вспомните, как работает простой автомат. Он поступаетт по раз и навсегда задуманной жесткой программе. Самое незначительное отклонение выводит его из равновесия и даже может привести к поломке.
Это похоже на то, как движется от станции к станции поезд по железной дороге. Он держит путь строго по линии рельсов. Отклонение в сторону на несколько сантиметров, и авария неизбежна.
Другое дело электронная управляющая система. Она, подобна гусеничному вездеходу, сама себе сначала настилает колею, а уж потом по ней движется. Робот с электронным "мозгом" потому и проявляет такую гибкость в управлении, что, получив лишь краткую информацию - условие задачи, может согласно прогрпмме сам для себя вырабатывать команды в зависимости от того, какие препятствия попадаются ему на пути.
Роботы наших дней: ЧТС и ТУМ - их построили школьники
Попробуем провести "курс обучения" робота-кошки, взаимодействующего с печкой. Предположим, что, оценив все варианты восстановления нужной температуры, робот принял решение отойти от печки.
Выбрав вначале наугад направление отхода и пройдя некоторое расстояние, однако недостаточное для восстановления нормальной температуры, робот наткнулся на какое-то препятствие. Подчиняясь программе и сигналу, полученному от препятствия, он вернется в исходное положение. В его памяти будет зафиксирован сигнал о неудаче в выборе направления.
Теперь робот предпримет новую попытку отхода уже в другом направлении. И если его вновь постигнет неудача, он опять вернется назад. Обследовав всевозможные направления отхода и запомнив результат своих поисков, робот, наконец, найдет правильное решение. Теперь автомат "обучен".
Когда перед ним вновь поставят аналогичную задачу, он сразу будет действовать правильно - выберет беспрепятственно направление отхода.
"Обучение" строится по методу проб и ошибок. Робот, можно сказать, учится на ошибках. Способ, конечно, примитивный, но не так уж плох. Ведь и человек очень часто учится на ошибках - своих и чужих.
В связи со способом обучения автомата уместно вспомнить лабиринтную задачу, о которой мы рассказывали в первой части книги. В конечном счете всякий процесс обучения имеет много общего с поиском правильного и кратчайшего пути в лабиринте. Поэтому привлекает большое внимание машинное решение лабиринтных задач с помощью специальных устройств, о которых мы еще расскажем.
Вместе с тем разрабатывают программы решения задач такого типа на универсальных вычислительных машинах. В одном из опытов программу построили так. Машину разделили на две части. Одна часть играла роль обучающегося робота, а другая изображала некоторое число "магазинов" с неодинаковым ассортиментом товаров. Перед роботом была поставлена задача - научиться быстро находить требуемый предмет.
И здесь процесс обучения происходил методом проб и ошибок. Вначале робот блуждал по лабиринту "магазинов" в поисках нужного "товара". Достигнув успеха, он запоминал "магазин", в котором имеется требуемый ассортимент "товаров".
После такой тренировки робот безошибочно отправлялся в тот или иной "магазин" за указанным предметом.
Читатель, внимательно познакомившись с этой главой, сможет теперь себе представить реальные возможности создания автоматов высшего типа, способных принять на себя многие функции человека по управлению самыми различными производственными процессами.
|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://informaticslib.ru/ 'Библиотека по информатике'