§ 8.4.2. Получение признаков с использованием в качестве исходного описания непрерывных сигналов датчиков
Пусть на автомат подаются два напряжения Р (t) и S (t). На плоскости Р (S) будет иметь место динамограмма, изображенная на рис. 8.17.
Четыре характерных точки на динамограмме представляют собой минимум сигнала хода S (t) (точка 1), максимум сигнала усилий Р (t) (точка 2), максимум сигнала хода S (t) (точка 3), минимум сигнала усилий Р (t) (точка 4).
На рис. 8.17 значения усилия Р, хода S в указанных точках обозначены соответственно через


а соответствующие им моменты времени обозначены через

Разобьем участок усилий

на I/2 интервалов, каждый из которых обозначим Δ1Pi. Аналогично поступим с участком

и интервалы на этом участке обозначим Δ2Рi.
Введем понятия относительного усилия χi и относительного приращения усилия Δχi. Тогда
 (8.4.1)
(8.4.1) (8.4.2)
(8.4.2)Из формулы (8. 4. 2) видно, что относительное приращение усилия Δχi представляет собой постоянную величину, обратно пропорциональную общему числу интервалов I.
Введем, кроме того, понятие относительного перемещения х. Значения хi в точках χ=χi имеют вид
 (8.4.3)
(8.4.3)Совокупность значений x=χi представляет собой выбранное нами исходное описание X, на основе которого были созданы два признака y1, y2, по которым затем принималось решение (см. § 8.3).
Если обозначить оптимальную матрицу перехода от пространства параметров исходного описания X в пространство признаков Y через WT, то значения двух признаков, которые, как это следует из эксперимента, необходимы и достаточны для диагностирования, можно записать в виде
 (8.4.4)
(8.4.4) где w(1)i представляет собой I-й элемент первой строки матрицы W̃T, а w(2)i-i-и элемент второй строки.
В значение признаков (ф-ла 8. 4. 4) входит число элементов, равное I. Заменим величину I связанной с ней величиной относительного приращения усилия Δχi (формула 8.4.2). Тогда
 (8.4.5)
(8.4.5)
Величина Δχi. зависит от числа интервалов I. При большом числе интервалов эта величина достаточно мала. Можно перейти к пределу, устремляя I к бесконечности.
При этом Δχi. будет стремиться к дифференциалу dχ, а сумма заменится интегралом. Значения признаков будут стремиться к значениям y*1 и y*2, несколько отличающимся из-за замены суммы интегралом:
 (8.4.6)
(8.4.6)
где функции

получены при помощи интерполирования по дискретным значениям
Интегрирование производится при изменении


Вводим новые функции

получаемые как интегралы весовых функций:
 (8.4.7)
(8.4.7)При известных значениях
в дискретных точках функции

легко вычисляются.
Подставляя новые функции (формула 8. 4. 7) в уравнения для признаков (8. 4. 6), умножая и деля на dt, а также учитывая, что каждая из рассмотренных величин является в конечном счете функцией времени, получаем
 (8.4.8)
(8.4.8)Для аналогового нахождения признаков необходимо перейти к исходным величинам Р (t) и S (t). Это нетрудно сделать, подставляя в формулу (8. 4. 8) значения исходных параметров по формулам (8. 4. 1), (8. 4. 2), (8. 4. 3):
 (8.4.9)
(8.4.9) (8.4.9)
(8.4.9)Формула (8. 4. 9) для признаков y*1, y*2 является исходной для создания проекта аналогового автомата.
Проектирование автомата можно упростить, несколько преобразовав исходную формулу (8. 4. 9)..
Обозначим
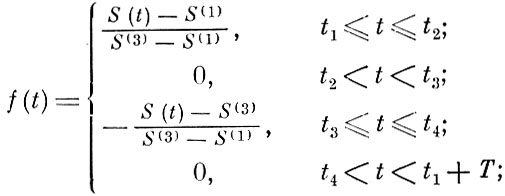 (8.4.10)
(8.4.10)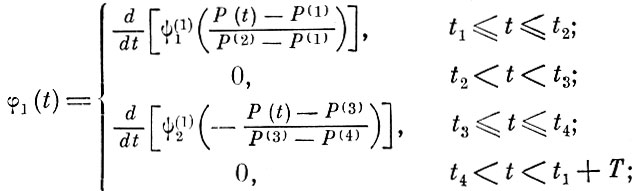 (8.4.11)
(8.4.11)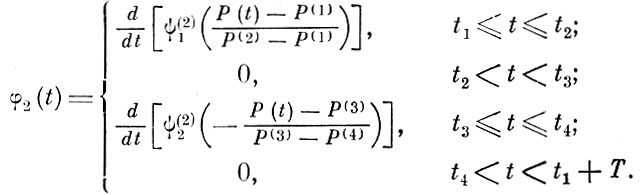 (8.4.12)
(8.4.12)Подставляя значения f(t), φ1(t) и φ2(t) по формулам (8. 4. 10), (8. 4. 11) и (8. 4. 12) в (8. 4. 9), получаем окончательное выражение для признаков y*1, y*2, удобное для проектирования автомата:
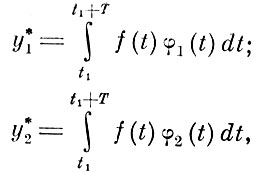 (8.4.13)
(8.4.13)где T - полный период работы насоса.
|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://informaticslib.ru/ 'Библиотека по информатике'