§ 8.4. О проекте аналогового устройства для диагностики неисправностей нефтяных насосов
§ 8.4.1. Постановка задачи
Диагностирующее устройство должно преобразовывать подаваемое на него исходное описание в признаки и на основе этих признаков при помощи решающего правила принимать решение о неисправностях.
В теоретической части (§ 8.3) считалось, что исходное описание представляет собой замкнутую динамограмму зависимости усилия Р в точке подвеса штанги от длины хода S полированного штока. При этом для расчета использовалось не все исходное описание, а только большое число отдельных точек на динамограмме.
В действительности информация о динамограмме поступает в скрытом для диагностирующего автомата виде. Реально мы имеем дело не с динамограммой, а с двумя напряжениями, зависящими от времени Р (t) и S (t).
Процесс нахождения большого числа значений напряжений в определенных точках динамограммы представляет собой трудную задачу. Поэтому пришлось несколько изменить теоретические предпосылки к составлению проекта аналогового диагностирующего устройства с тем, чтобы в качестве исходного описания можно было использовать непосредственно напряжения Р (t) и S (t) с дополнительным выделением информации о напряжениях только в четырех характерных точках динамограммы.
В пользу использования в качестве исходного описания непрерывной кривой, а не дискретных отсчетов, говорит также улучшение помехоустойчивости, которая возрастает с увеличением числа отсчетов.
При получении признаков обычно суммируются произведения дискретных значений функций на соответствующие весовые коэффициенты матрицы W̃T. При увеличении количества отсчетов строка матрицы превращается в весовую функцию, а суммирование заменяется интегрированием.
В аналоговых устройствах возможно интегрирование только по времени. Замена суммирования дискретных значений на динамограмме интегрированием по времени может привести к ошибкам, связанным с непостоянством работы насоса. Ниже описывается метод, позволяющий получать результат, инвариантный к изменению периода работы насоса.
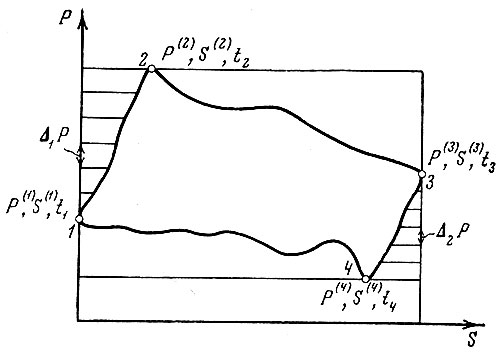
8.17. Динамограмма P(S)
Идея, на основе которой достигается эта инвариантность, заключается в том, что ошибка в величине получаемого признака из-за интегрирования по времени компенсируется введением вместо весовой функции производной по времени от заранее вычисляемого интеграла этой весовой функции по ее независимой переменной (см. ниже формулы 8.4.7-8. 4. 9).
|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://informaticslib.ru/ 'Библиотека по информатике'