1.1. Постановка и классификация задач. Общие понятия
Когда говорят о задачах математического программирования (планирования), то имеют в виду класс задач оптимизации, возникших в последние три десятилетия в связи с попытками повысить эффективность промышленных, транспортных, военных систем за счет улучшений в работе координирующих и управляющих органов. Несмотря на разнообразие смыслового содержания таких задач, все они с формальной точки зрения сводятся к одной общей постановке: найти значения переменных x1, x2, ...., xn, доставляющие максимум (минимум) заданной скалярной функции z = f(x1 ,..., xn) при условиях

Условия, о которых идет речь, ограничивают выбор значений х1, х2,...., хn и могут обладать самыми разнообразными свойствами, определяемыми видом функций gi(x1, х2,..., хn); в каждой из m строк здесь сохраняется какой-либо один знак (равенство, неравенство).
Введем ряд общих понятий, которые понадобятся в дальнейшем.
1. Совокупность различимых между собой объектов одинаковой природы принято называть множеством; каждый из таких объектов в отдельности есть элемент множества (принадлежность некоторого элемента множеству E обозначается как e ∈ E); в данном пособии речь будет идти о множествах, элементами которых являются математические объекты (числа, точки, функции и т. п.).
2. Множество E1 представляет собой некоторое подмножество множества E (обозначается E1∩E2), если каждый элемент e, принадлежащий E1, одновременно принадлежит и E; в случае, когда E1 не содержит ни одного элемента (т. е. является пустым множеством, E1 = ∅ ), оно может рассматриваться как подмножество любого множества E.
3. Пересечение множеств E1 и E2 (обозначается E1∩E2) есть множество всех элементов e, содержащихся и в E1 и в E2, объединение множеств и E2 (обозначается E1∪E2) есть множество всех элементов e, содержащихся либо в E1, либо в E2, либо и в E1, и E1.
4. Множество E называется упорядоченным, если любые два его элемента e1, e2 связаны либо отношением e1<e2, либо отношением e1>e2 (таким свойством обладает, например, множество всех вещественных чисел); в этих условиях элемент ê называется верхней границей множества E, если ě≤e для всех e∈E, наименьший из имеющихся ê называется точной верхней границей (аналогично определяются нижняя и точная нижняя границы множеств).
5. Множество E называется метрическим пространством, если каждой паре его элементов e1, e2 поставлено в соответствие неотрицательное число (метрика) ρ(e1, e2), удовлетворяющее условиям: ρ(e1, e2) = 0 только при e1 = e2 (аксиома тождества), ρ(e1, e2) = ρ(e2, e1) (аксиома симметрии), ρ(e1, e2) + ρ(e2, e3) ≥ ρ(e1, e3) (аксиома треугольника).
6. Метрическое пространство, элементами которого являются упорядоченные системы из n вещественных чисел (x1, x2 ,..., xn) = X, (y1, y2 ,..., yn) = Y, а метрикой - расстояние

называется n-мерным эвклидовым пространством (обозначается Rn); элементы X, Y, ... могут рассматриваться как точки пространства Rn (или векторы в пространстве Rn), определяемые своими координатами xj, yj, ... (j = 1,...,n); величина
называется нормой или модулем вектора X; произведение вида ||Х||||Y||cos γ, где γ - угол между векторами X и Y называется скалярным произведением (X, Y) этих векторов.
7. Множество точек X∈Rn, для которых ρ(Х, Х0)≤r, называется замкнутым шаром радиуса r с центром в точке Х0; множество точек X∈Rn, для которых ρ(Х, Х0)<r, называется открытым шаром с центром в Х0.
8. Окрестностью произвольной точки Х∈Rn называется любой открытый шар с центром в этой точке.
9. Подмножество R̄n множества Rn называется ограниченным, если оно содержится в (некотором замкнутом шаре S(r, X0)⊂Rn; диаметром множества R̄n в пространстве Rn называется точная верхняя граница расстояний между любыми двумя точками Х1, X2∈R̄n.
10. Точка XΠ∈Rn называется пределом последовательности точек Xk, принадлежащих Rn, k = 1, 2, .. если ρ(Xk, ХΠ) → 0 при k → ∞.
Заметим теперь, что множество точек X, удовлетворяющих системе ограничении
есть область определения (U) поставленной выше задачи. Функция z называется целевой функцией (в конкретных исследованиях это - критерий эффективности технической системы, показатель качества производственного плана и т. п.); она достигает своего экстремального значения в одной или нескольких точках области U, которые нужно искать.
Обычно вид функций z к gi (i = 1,..., m) известен, константы bi заданы, величины тип являются произвольными целыми числами (в отдельных случаях между ними устанавливается отношение вида m<n). Специально оговариваются ограничения, выраженные в требованиях не отрицательности и целочисленности переменных xj (j = 1,...,n).
Сделанные замечания позволяют дать краткую символическую запись условий задачи математического программирования:

В основу существующей классификации таких задач положены особенности функций z или gi, встречающихся в конкретных практических исследованиях. Различают два основных класса задач математического программирования - задачи линейного и нелинейного программирования. К первым относятся такие, в которых и целевая функция, и все функции gi (i = 1,...,m) линейны относительно переменных xj (j = 1,..,n), т. е.
(здесь cj и aij - известные постоянные коэффициенты). Из дополнительных ограничений обычно вводится требование ∀xj ≥ 0 (j = 1,...,n). Если к тому же поставлено условие "все (или некоторые) xj - целые числа", возникает задача целочисленного линейного программирования; методы ее решения имеют свои характерные особенности.
Во всех других случаях говорят о задачах нелинейного программирования. Чтобы не перечислять их многочисленные признаки, обратим внимание на следующее. В настоящее время хорошо изучены и довольно широко распространены задачи:
- решаемые методами классической математики при условии, что среди ограничений нет неравенств и m<n, нет требований не отрицательности или целочисленности переменных, функции z и gi непрерывны и по крайней мере дважды дифференцируемы;
- с линейными ограничениями и целевой функцией вида
- с сепарабельной целевой функцией
- обладающие такими универсальными свойствами, как выпуклость z и U, что позволяет формировать и использовать условия существования решений независимо от конкретных форм задания z и gi (i = 1,...,m).
Приведенная классификация условна, поскольку она охватывает лишь задачи с полной информацией (т. е. такие, с которых все определено); кроме них можно указать целые группы задач, содержащих различные неопределенности (случайность отдельных параметров, отсутствие сведений о виде целевой функции и т. д.), следствием чего является практически неограниченное разнообразие приемов решения, позволяющих собрать и эффективно использовать недостающую информацию. Все это нашло отражение в материалах и структуре разделов книги, подчеркивающих важность существующих проблем оптимизации для различных областей целенаправленной деятельности.
Обратимся теперь к определениям экстремума, имея в виду безусловный абсолютный максимум (минимум), безусловный относительный максимум (минимум), условный абсолютный максимум (минимум) и условный относительный максимум (минимум).
Пусть в оптимизационной .задаче нет условий-ограничений (m = 0, отсутствуют ограничения вида xj - целые числа) и целевая функция z = f(X) определена на множестве Rn. В этом случае говорят, что f(X) имеет безусловный абсолютный (глобальный) максимум в точке X*, если f(X)≥f(X) для всех X∈Rn. Изменив здесь знак неравенства на противоположный, приходим к определению безусловного абсолютного минимума f(X). Таким образом, точка X* как бы доминирует над всеми остальными точками пространства Rn, доставляя функции f(X) экстремальное значение.
Нетрудно представить, что могут существовать и такие точки (назовем их X°), которые доминируют в указанном смысле лишь над соседними, довольно близко лежащими точками; с существованием Х° связано понятие относительного (или локального) экстремума.
Пусть по-прежнему в задаче нет никаких ограничений и функция z = f(X) определена на множестве Rn. Рассмотрим множество точек X, составляющих окрестность (хотя бы достаточно малую) некоторой точки Х°. Если для всех этих X справедливо утверждение f(Х°)≥f(Х), то в точке Х° функция f(X) имеет безусловный относительный (локальный) максимум. Изменение знака неравенства на противоположный позволяет дать определение безусловного относительного минимума.
Если приведенные выше неравенства сделать строгими, то можно говорить о сильном экстремуме; в противном случае определяется слабый экстремум.
Рассмотренные виды экстремума редко встречаются на практике. Для любой задачи математического программирования характерно наличие более или менее жестких ограничений, придающих ей определенную специфику. В этом случае искомые экстремальные точки X* или Х° должны обязательно принадлежать области U, поэтому сам экстремум называется условным.
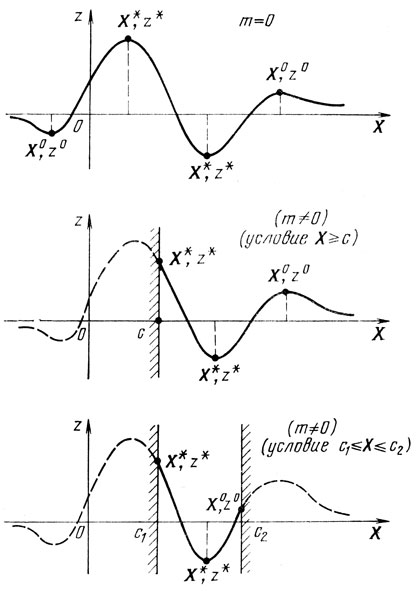
Рис. 1.1
Пусть дана задача математического программирования в общей постановке (см. стр. 8) и z = f(X) определена на Rn. В этом случае точка Х*∈U является точкой условного абсолютного максимума z, если для всех X∈U выполнено f(Х*)≥f(Х).
Наконец, функция f(X) имеет в Х°∈U условный относительный максимум, если неравенство выполнено для всех X, принадлежащих и области U, и некоторой окрестности точки Х°.
Изменив здесь знаки неравенств, можно получить соответствующие определения условного минимума z или, рассмотрев только строгие неравенства, сформулировать понятия сильного условного экстремума и т. д. Дополнительные пояснения дает рис. 1.1, иллюстрирующий приведенные определения.
Чтобы закончить обсуждение общих вопросов, обратим внимание на следующее: с формальной точки зрения нет необходимости различать задачи поиска максимума и минимума, так как одна задача сводится к другой изменением знака z; принятые обозначения (X* и Х°) точек абсолютного и относительного экстремума будут сохранены в дальнейшем, соответствующие им значения z есть z* и z°; из рис. 1.1 следует, что точек Х° (и даже X*) может быть несколько и что Х:,: является одновременно точкой локального экстремума; это дает основание искать X* путем перебора Х° и сравнения имеющихся f(X°) (особенно тогда, когда применяемые методы решения задач позволяют получать лишь Х°).
|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://informaticslib.ru/ 'Библиотека по информатике'