3.6. Составление и анализ функциональных уравнений
Для простоты будем рассматривать задачу минимизации функционала вида
или (в других обозначениях)
с граничными условиями

Таким образом, отыскивается кривая y = y*(x), соединяющая точки (х1, c1) и (х2, c2), на которой J достигает минимума (рис. 3.5).
Переходя к составлению основного функционального уравнения, разделим интервал [х1, х2] на две части [х1, х̄], [х̄, х2] и введем в рассмотрение функцию
(рассматривается минимум по у на интервале [x̄1, x2]). Ясно, что изменения х̄ вызовут соответствующие изменения g (в частности, ξ = 0 при х̄ = х2 и ξ = J* при х̄ = х1). Теперь, в соответствии с принципом оптимальности, можно утверждать
 (3.5)
(3.5)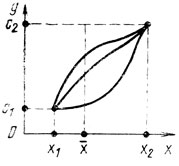
Рис. 3.5
Предположим, что x̄ мало отличается от x1, т. е. Δ = х̄ - х1 есть малая положительная величина, которую всегда можно выбрать так, что справедливы приближенные равенства


(сумма линейных членов разложения ξ в ряд Тейлора в окрестности точки (х1, c1). В этих условиях соотношение (3.5) принимает вид
 (3.6)
(3.6)Поскольку ξ(x1,c1) есть просто J* (см. определение ξ), равенство (3.6) можно представить как
или
 <(3.7)br>
<(3.7)br>Здесь необходимо заметить следующее: приблизив х̄ к x1 настолько, что стала допустимой линеаризация задачи, следует заменить требование найти оптимальную в смысле min J траекторию yx̄, x1 требованием найти оптимальное значение производной y' в точке х1 (это и сделано выше). Переходя теперь к пределу при Δ→0 в (3.7), имеем
 (3.8)
(3.8)Чтобы определить величину y'(х1) = ŷ', доставляющую минимум вида (3.8), нужно рассмотреть уравнение dF/dy'+(dξ/dy)c1=0, получаемое дифференцированием суммы в (3.8) и приравниванием производной нулю. В то же время подстановка ŷ' в (3.8) должна обратить эту сумму в нуль (в этом случае она принимает свое наименьшее значение, равное нулю). Следовательно, ŷ' удовлетворяет системе о уравнений
 (3.9)
(3.9)
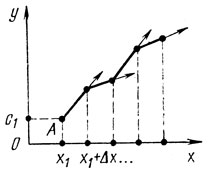
Рис. 3.6
Ее решение должно указать ŷ' (х1) и тем самым определить направление "выхода" оптимальной кривой y = у*(х) из точки (x1, c1) (рис. 3.6). Зная это, легко выбрать следующую точку с координатами (x1+Δх; y1+ŷ;Δx) и повторить для нее всю процедуру отыскания оптимального направления ŷ'(х1+Δх). Последовательное вычисление оптимальных производных при значениях х = x + lΔх (l = 1, 2, ...) является характерной особенностью рассматриваемого подхода к решению вариационных задач.
Уравнения (3.9) являются, вообще говоря, нелинейными дифференциальными уравнениями в частных производных и могут быть сведены к известным из классического вариационного исчисления уравнениям Эйлера. Для этого достаточно найти полную производную по л: верхней строки (3.9) и частную производную по у нижней строки (3.9), т. е.
 (3.11)
(3.11)Если теперь вычесть (3.11) из (3.10), то новое равенство
окажется просто уравнением Эйлера. Таким образом удается не только установить связь между уравнениями (3.9) и (3.12), но и показать возможности формализации вариационных задач, отличной от классической и базирующейся на принципах динамического программирования.
|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://informaticslib.ru/ 'Библиотека по информатике'