5.1. Симплексный метод
(Симплексный метод часто называют "методом последователь-юго улучшения плана". )
По существу, симплексный метод представляет собой последовательный перебор угловых точек, при котором значение целевой функции убывает от итерации к итерации (от одной угловой точки - к другой).
Будем рассматривать каноническую задачу линейного программирования
 (5.1)
(5.1) Предполагается, что задача (5.1)-невырожденная, то есть не вырождена каждая угловая точка множества R0.
Итерационный шаг метода состоит в переходе от угловой точки х к угловой точке х', при котором значение целевой функции убывает:
Пусть известна угловая точка х. Не ограничивая общности, можно считать, что базис В этой угловой точки образуют первые т столбцов матрицы А. Будем записывать матрицу А следующим образом:
где

Соответствующим образом запишутся векторы х и с:

Компоненты вектора хв иногда называют базисными, а вектора xD-внебазисными.
Заметим, что если хоть одна компонента вектора хв-нулевая, то угловая точка х - вырожденная. В самом деле, если, например, хm=0, то, вычеркивая из матрицы В последние строку и столбец, получаем, что х удовлетворяет квадратной не особенной системе уравнений порядка m-1, то есть угловая точка х будет вырожденной.
Итак, известна угловая точка х. При этом.
Рассмотрим векторы
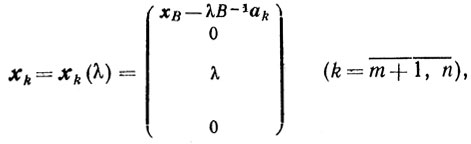 (5.2)
(5.2)где λ является k-й компонентой вектора х.
Во-первых, заметим, что поскольку хв > 0, то при малых λ>0 будет хk≥0. Далее, так как
 (5.3)
(5.3)то xk∈R0 при малых λ > 0. Кроме того,

Обозначим
Заметим, что величина Δk определена для любого k = 1,..., n, причем при k = 1, ...., m, поскольку В-1ak=ek (ek - k-й координатный вектор), имеем
Окончательно получаем соотношение
В зависимости от знаков величин Δk и (В-1ak)i возникают три случая.
I. Если для любого k = 1, 2, ..., n будет Δk≤0, то точка х - оптимальная.
Действительно, обозначим
Тогда условие Δk≤0 запишется так:

или, что то же самое,
Поскольку двойственной к задаче (5.1) является задача
 (5.6)
(5.6)то ȳ ∈ Q0. И так как
то из теоремы 4.4 следует оптимальность точки х. II. Если найдется номер k≥m+1 такой, что
то множество R0 не ограничено и функция <с, х> не ограничена снизу на R0.
Действительно, из (5.2) следует, что при любом λ>0 будет
Отсюда и из (5.3) получаем, что xk(λ)∈R0. А из (5.5) следует, что
при λ→+∞.
III. Пусть найдутся такие k≥m+1 и i≤m, что
В этом случае делается итерационный шаг. Обозначим

и выберем
Заметим, что λ0 > 0, поскольку

* (Напомним, что запись (B-1ak)i означает i-ю компоненту вектора В-1аk.)
При таком выборе величины 0 точка хk = хk(λ0) становится допустимой точкой множества R0 (см. (5.2) и (5.3)). Номер s, для которого достигается минимум в (5.7), единствен, ввиду не вырожденности задачи (5.1). В самом деле, если бы минимум достигался более чем для одного номера, то из (5.3) видно, что вектор b выражался бы линейно с положительными коэффициентами менее чем через m векторов аi матрицы A, то - есть точка хk удовлетворяла бы системе уравнений размерности меньшей m и, следовательно, точка хk была бы вырожденной угловой точкой. А это противоречит I предположению о не вырожденности. То, что хk - угловая точка, проверить нетрудно. Для этого достаточно показать, что система векторов а1, а,2 ..., as-1, as+1 , ..., am, аk линейно-независима. Предположим противное, то есть что найдутся такие числа β1, β2, ..., βs-1, βs+1 ,....,βm, βk, не все равные нулю, что
 (5.8)
(5.8)Обозначим
 (5.9)
(5.9)Тогда тождество ВВ-1хаk-аk≡0 запишется так:
Умножая это тождество на βk и складывая с (5.8), получаем
Так как det В≠0, то это равенство возможно лишь при всех нулевых коэффициентах:
Но
поскольку s∈Ik, и, следовательно, βk = 0, а тогда и все βi = 0, что противоречит предположению о числах β1, β2,.....,bs-1, βs+1,...,βm, βk.
Итак, хk - новая угловая точка, причем
"Из изложенного выше следует, что итерационный шаг симплексного метода состоит в таком переходе от базиса а1, а2, ..., as-1, as, аs+1, ..., аm к базису а1, а2, ..., as-1, аs+1, ..., аm при котором целевая функция убывает, а значит, симплексный метод приводит к угловой точке x*, в которой достигается минимум, за конечное число итераций.
|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://informaticslib.ru/ 'Библиотека по информатике'