2.4. Как усовершенствовать регулирование
Выяснение всех, рассмотренных нами только что зависимостей - не самоцель, не какое-то математическое хобби. С их помощью можно изучать и улучшать работу технических устройств.
Как показали последние приведенные нами примеры, для того чтобы усовершенствовать регулирование, необходимо уменьшить инерционность отдельных звеньев контура регулирования и выбрать наилучшее регулирующее устройство. Мы рассмотрим еще несколько примеров, чтобы показать, как кибернетика помогает технике решать эти проблемы.
Устройства, изображенные на рис. 58, используются на испытательном стенде, где проверяют автомобильные моторы. К карбюратору должен подводиться воздух постоянной температуры. Для этого необходим специальный нагреватель, но возникает следующая проблема: если резко нажать на педаль акселератора, то через нагреватель пройдет больше воздуха, чем он способен нагреть за это время. Воздух охладится и испытательный стенд даст неверные результаты. Причина этого - неудачная конструкция нагревателя, изображенного на рис. 58, а. Даже если вентиль отопления будет открыт одновременно с увеличением протока воздуха через нагреватель, горячий пар должен сначала нагреть трубы и другие металлические части. Объект регулирования обладает слишком большой инерционностью. Конструкция, изображенная на рис. 58, б, значительно удачнее: воздуховод всегда нагрет до определенной температуры и нагревание воздуха происходит быстро (но за счет большого расхода энергии).
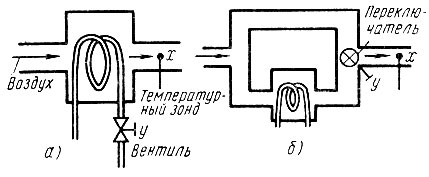
Рис. 58. Нагреватели с различной инерционностью: а - неудачная конструкция: передача регулирующего воздействия y→x происходит слишком медленно; б - удачная конструкция: передача регулирующего воздействия y→x происходит быстрее
Аналогичный случай изображен на рис. 59. Из двух устройств для нагревания воды в бассейне до определенной температуры конструкция, изображенная на рис. 59, б, предпочтительнее. Она быстрее реагирует на изменение положения вентиля, поскольку здесь меньше последовательно соединенных звеньев. Обратим внимание на то, что в обоих вариантах объекты регулирования слишком инерционны и это вызывает задержку сигнала.
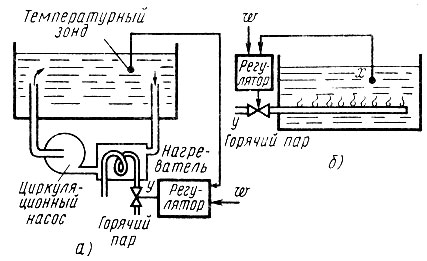
Рис. 59. Устройства для регулирования температуры воды в бассейне с различными динамическими характеристиками: а - неудачный вариант регулирования; б - более удачный вариант
Устранить или хотя бы уменьшить эту задержку можно, если получше изучить характеристики сигнала. Охотник попадает из ружья в бегущего зайца только потому, что наряду с местонахождением зайца в данный момент он учитывает и скорость его движения: прицеливаясь, он делает упреждение. Регулированием по производной или упреждением в технике называется процесс, при котором измеряется не сама регулируемая величина, а скорость ее изменения. Регулирующее устройство в данном случае заблаговременно получает информацию об изменении регулирующего воздействия и поэтому раньше может принять необходимые контрмеры.
На рис. 60 изображен запаздывающий выходной сигнал П-регулятора. Как мы уже видели, такое запаздывание значительно снижает эффективность регулирования. Положение улучшается, если регулятор дополнительно измеряет скорость изменения входного сигнала xвх. Так возникает дополнительный упреждающий входной сигнал, который заставляет регулятор реагировать быстрее.
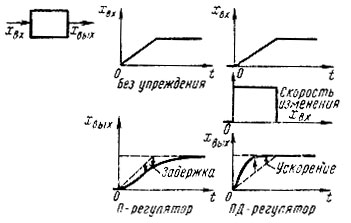
Рис. 60. Упреждение уменьшает задержку при передаче сигнала
Вычисление скорости изменения какой-либо величины называется дифференцированием. Поскольку регулятор теперь состоит из пропорционального (П) и дифференцирующего (Д) компонентов, он называется ПД-регулятором. По своим свойствам он превосходит обычный П-регулятор. Поэтому там, где отмечается значительная задержка сигнала, применяют не П-, а ПД-регуляторы. Буква "Д" означает дифференцирование и указывает на то, что в регуляторах этого типа вычисляется и учитывается скорость изменения сигнала.
Если время задержки велико, то и упреждение не помогает: необходимо реконструировать звенья контура регулирования или ввести вспомогательную регулируемую величину.
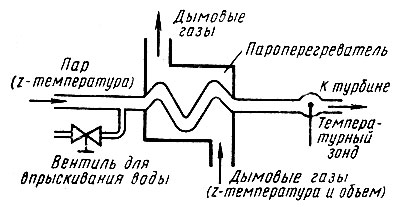
Рис. 61. Регулирование работы пароперегревателя малоэффективно, так как задержка слишком велика
На рис. 61 и 62 показаны сравнительно малоэффективные контуры регулирования, а на рис. 63 и 64 - более удачные варианты. На тепловой электростанции пар, вращающий турбину, доводится до нужной температуры во вторичном пароперегревателе; для этого используются образующиеся в топке дымовые газы (см. рис. 61). Чтобы уравновесить колебания температуры пара, в паропровод впрыскивается некоторое количество воды, которое определяется положением установочного вентиля. Но объект регулирования - пароперегреватель - обладает большой инерционностью, время задержки слишком велико. Регулирование температуры пара обычными средствами показано на рис. 62. Измеряемая температурным зондом регулируемая величина x вводится в регулятор, управляющий положением вентиля. Но и здесь пар проходит через змеевик слишком медленно - значительная задержка ставит под вопрос эффективность такого регулирования. Возмущающие воздействия (колебания температуры поступающего пара или температуры дымовых газов) не могут быть в достаточной мере уравновешены.
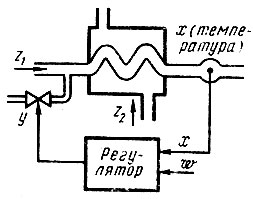
Рис. 62. Этот вариант несколько лучше, чем показанный на рис. 61
Последствия возмущающих воздействий и регулирующего воздействия (впрыскивание воды) регулятор может учесть гораздо быстрее, если он получает предваряющую информацию в виде дополнительного сигнала (см. рис. 63). Такой сигнал xвсп называется вспомогательной регулируемой величиной. Для этой величины должен существовать свой, дополнительный контур регулирования. Ее использование, как и в примерах, взятых из биологии (см. подразд. 1.5.2), значительно улучшает качество регулирования.
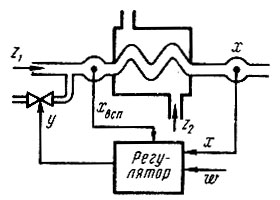
Рис. 63. Вспомогательная регулируемая величина xвсп, которая реагирует быстрее, чем основная регулируемая величина x, может ускорить процесс регулирования, а значит, сделать его более эффективным
Вспомогательная регулируемая величина - это регулируемая величина вспомогательного контура при многоконтурной системе регулирования.
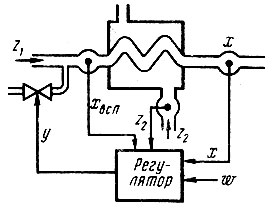
Рис. 64. Информация о главном возмущающем воздействии z2 поступает непосредственно в регулирующее устройство (регулирование по возмущению)
Систему, состоящую из основного и вспомогательного контура регулирования часто называют системой каскадного регулирования. Эти термины уже встречались нам при рассмотрении биологического регулирования. Но изменение вспомогательной регулирующей величины xвсп не может отразить все возмущающие воздействия: воздействие температуры дымовых газов останется нескомпексированным. Чтобы решить эту проблему, необходимо как-то измерять это возмущающее воздействие и передавать соответствующую информацию регулирующему устройству. Этот процесс получил название регулирования по возмущению (см. рис. 64), т. е. регулятор может впрыскивать такое количество воды, которое компенсирует возмущающее воздействие еще до того, как оно скажется на регулируемой величине (температура пара) на выходе пароперегревателя.
Все эти усовершенствования необходимы тогда, когда обычный контур регулирования не может выполнить свою задачу. Структура контура при этом усложняется - проектировать и внедрять такие устройства могут только знающие и опытные инженеры. Природа же создала такие вспомогательные средства тысячи лет тому назад (см. рис. 26, 27).
|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://informaticslib.ru/ 'Библиотека по информатике'