10.4. Планирование многоэтапных работ. Пошаговый процесс упорядочения
Рассматриваемая здесь задача представляет собой обобщение известной задачи Джонсона (см. § 8.3) на случай произвольного M>2. Ее решение в рамках общего алгоритма системного планирования (см. п. 9.5) позволяет не только улучшать промежуточные значения Тс, но и указывать те l-системы, для которых нет необходимости составлять точное расписание.
Дана система, объединяющая M одноканальных участков, каждый из которых реализует вполне определенный этап технологического процесса. Имеются N работ, выполняемых в некоторой последовательности, и известны нормы времени τυk (v - номер работы по порядку следования, k - номер участка или этапа). Введены ограничения:
а) очередность работ сохраняется на всех участках неизменной (допустимость такого предположения обусловлена здесь тем, что оно упрощает исследования и затем постепенно исключается в ходе преобразования общесистемного плана);
б) момент начала k-го этапа v-й работы не может наступить раньше момента окончания ее (k-1)-го этапа;
в) для отдельных работ установлены плановые сроки скончания, которые необходимо выдержать;
г) возможна частичная упорядоченность работ (некоторые из них не должны проводиться раньше каких-то Других).
В этих условиях требуется найти последовательность работ, наилучшую в смысле минимума полного времени (Тс(l)), затрачиваемого на их выполнение (рис. 10.8).
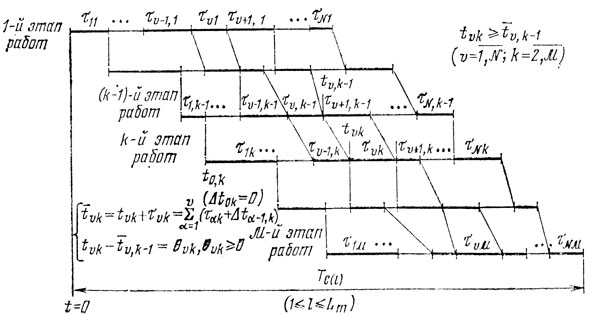
Рис. 10.8
Перечисленные ограничения не противоречат тому, что обсуждалось в § 8.5, и даны для конкретизации общих замечаний применительно к частной задаче.
Введем единый отсчет времени (t = 0); пусть t0k - момент возможного начала k-го этапа, a Δtυ-1,k задержка начала k-то этапа v-и работы относительно момента окончания того же этапа (v-1) работы. Очевидно, Δtυ-1,k≥0 и условие б) может быть выражено как

или
 (10.5)
(10.5)где θυk - вспомогательные неотрицательные переменные (θυk≥0), имеющие размерность времени; Δt0,k-1 - задержка начала (k-1)-го этапа (своего рода начальные условия).
Последнее равенство показывает, что v-я (по порядку) работа будет выполнена за время
Объединив номера v, для которых существуют плановые сроки, в множество SП, получаем формальное выражение условия в):

или
 (10.6)
(10.6)где φυΠ - вспомогательные неотрицательные переменные.
Условия а) и г) связывают порядковые номера, которые получают работы, проводимые в оптимальной последовательности, поэтому формализация этих условий априори ничего не дает.
Система уравнений (10.5) может быть представлена в виде


или (после попарного вычитания строк)
 (10.7)
(10.7)Заметим, что всегда можно положить Δt0k(k = 1, ..., M) равными нулю (или, что то же, включить их условно в τ1k). Кроме того, работы подготовительные, регламентные и т. п. могут быть учтены наравне со всеми другими работами в общих соотношениях вида (10.5) - (10.7).
Обозначим

к через
через
через Т0 и обратимся к оптимизациоцной задаче: найти θυk, Δtυ-1,k, φυΠ, доставляющие

при ограничениях

 (10.8)
(10.8)Зафиксировав произвольным образом все τυk, рассмотрим эту задачу как обычную задачу линейного программирования. Из выражения ТС(i) следует, что всякое допустимое базисное решение системы (10.8), содержащее в числе свободных переменные Δtυ-1,1 (υ = 2, ...,N), θNk (k = 2,....,M) будет оптимальным для сформулированной задачи. Однако подобные решения могут встретиться далеко не всегда, поэтому необходимы дополнительные исследования.
Обратимся к теореме (22): оптимальным является такое допустимое базисное решение (10.8), которое содержит в числе свободных все Δtυ-1,1 и одновременно удовлетворяет требованиям Δtυ-1,1θυk (υ = 2,..., N, k = 2,...,M) (переменная θυk может войти в базис только тогда, когда Δtυ-1,k является свободной и наоборот).
Доказательство этой теоремы основано на последовательном отделении заведомо свободных переменных θυk (см. § 9.1). Чтобы найти оптимальные решения в каждом конкретном случае, достаточно использовать простое правило: если в очередной строке (10.8) сумма Δtυ-1,k-1-θυ-1,k+ωυk неотрицательна, то в базис вводится Δtυ-1,k-1 a θυk считается свободной (равной нулю).Если же Δtυ-1,k-1-θυ-1,k+ωυk<0 базисной переменной становится θυk, a Δtυ-1,k обращается в нуль. Сформированное решение должно удовлетворять требованиям φυΠ≥0(υ∈SΠ), иначе оно окажется недопустимым.
В этих условиях можно говорить об оптимальной организации работ даже при фиксированном порядке их производства (не нарушающем ограничений а)-г)). Так, этапы работы, выполняемой первой, должны следовать друг за другом без задержек (θ1k = 0, k = 2,...,M); этапы любой промежуточной работы идут, вообще говоря, со сдвигами во времени один относительно другого (исключение составляет случай, когда все
(υ = 2, ..., N, k = 2,...,M) неотрицательны).
Полученные результаты неконструктивны (они отвечают предположению τυk = const и не дают рекомендаций по выбору наилучшего плана проведения работ), однако появляется возможность отождествить произвольную перестановку столбцов матрицы ||τυk| с некоторым показателем, вычисляемым довольно просто, что должно облегчить применение здесь метода динамического программирования (или методов, сходных с ним по идее). Условия для этого следующие:
- рассматривается Пошаговый процесс планирования;
- содержанием очередного шага является размещение того или иного столбца на определенной позиции;
- перед началом очередного шага возможны только N состояний процесса, причем параметр состояния скалярный (номер столбца).
Рассмотрим теперь время Тс(l) как функцию только τυk (υ = 1,...,N, k = 1, ..., M), имея в виду найденные решения. Оценка ТС(l), получаемая при использовании рекомендаций приведенной выше теоремы и обозначаемая как T̂C(l), обладает рядом особенностей: в общем случае Т̂С(l) представляет собой линейную комбинацию величин τυk т. е.
где cφk - целочисленные коэффициенты; каждое значение T̂C(l) отвечает заданному порядку работ, который в силу условия а) определяется порядком проведения их первого этапа (т. е. принятыми τυ-1 υ = 1,...,N), следовательно, τυk есть однозначно определенная функция τυ1 (υ = 1,...,N),
Учитывая эти замечания, получаем
Возможные наборы значений τυ1 образуются при перестановках N элементов первой строки матрицы ||τυk||, и множество всех таких перестановок объединяет N! элементов. Наиболее удобным для практической реализации представляется метод поиска оптимума Т̂С(l) по переменным τυ1 основанный на идее непосредственного пошагового формирования искомой расстановки работ и сводящийся к анализу промежуточных состояний и наилучших продолжений процесса планирования. Исходными данными здесь являются конкретизированные ограничения в), г) и матрица ||τυk|| с фиксированной произвольным образом нумерацией столбцов (исходная нумерация работ).
Основные этапы решения задачи: вводится предположение о том, что (N-1)-ю позицию занимает первая (по исходной нумерации) работа, и в рамках этого предположения исследуются варианты формирования двух последних позиций будущего плана ("первая и вторая работы", "первая и третья работы", ..., "первая и N-я работы"); для каждого такого варианта определяются
ωυk=τυ,k-1-τυ-1,k, Δtυ-1,k, θυk при υ = N, k = 2,..,M, проверяется выполнение условий в), г) и оцениваются величины
При проверках в) используются приближенные оптимистические показатели, вычисляемые для идеализированного случая, когда все θυk, Δtυ-1,k(υ = 2, ....,N-1; k = 2,...,M) положены равными нулю. По мере накопления информации достоверность этих показателей растет, и в конечном счете они переходят в T̂c(l)υ.
Вводится предположение о том, что (N-1)-ю позицию занимает вторая (по исходной нумерации) работа, и в рамках этого предположения исследуются варианты формирования двух последних позиций плана ("вторая и первая работы", "вторая и третья работы", .."вторая и N-я работы"). Для каждого варианта отыскиваются ωυk, θυk, Δtυ-1,k(υ = N; k = 2, ...,M), проверяются условия в), г) и оценивается Т̭с(l).
Рассмотренные операции повторяются для оставшихся предположений, связанных с размещением третьей, четвертой, ..., N-и работы на (N-1)-й позиции. Таким образом, оказываются исследованными ,N(N-1) вариантов, и становится возможным их сравнение с целью
указать наилучшие из полученных Т̂С(l) (все это удобно свести в первую таблицу результатов, содержащую перечни вариантов, допустимых по ограничениям а)-г) и упорядоченных по признаку ухудшения Т̂С(l)).
Вводится предположение о том, что (N-2)-ю позицию занимает первая (по исходной нумерации) работа; 3 рамках этого предположения исследуются варианты формирования трех последних позиций будущего плана, причем (N-1)-я и N-я позиции (т. е. продолжение процесса) выбираются здесь как единое целое на основе использования данных первой таблицы результатов. Определяются Δtυ-1,k, θυk (υ = N; k = 2,...,M), проверяются условия в), г) (по оптимистическим показателям) и оцениваются новые величины
Все эти операции повторяются применительно к предположениям, связанным с размещением второй, третьей, ..N-й работ на (N-2)-й позиции, так что общее число анализируемых вариантов составляет по-прежнему N(N-1). Все результаты, не нарушающие ограничений а) -г), сводятся во вторую таблицу.
Вводится предположение о том, что (N-3)-ю позицию занимает первая (по исходной нумерации) работа, и исследуются варианты формирования четырех последних позиций будущего плана. Набор работ, попадающих на (N-2)-ю, (N-1)-ю, N-ю позиции, дает вторая таблица результатов; проводятся стандартные проверки
условий в), г), вычисляются Т̂c(l), и, наконец, составляется третья таблица результатов; переход к новым предположениям продолжается до тех пор, пока не будут составлены и оценены последовательности из N работ.
Общее количество исследуемых вариантов в рассмотренной схеме не превысит N3 вместо N! при полном переборе (реальный выигрыш получается при N>5).
Методы составления расписаний, рассмотренные в § 10.1, 10.2, 10.4, реализуемы в сравнительно несложных программах для ЭВМ и во многом определяют исход решения общей задачи планирования (см. § 9.5). Формирование схем загрузки отдельно взятого участка и одноканальных l-систем делает возможным поэтапное улучшение общего плана на основе межканального обмена работами.
|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://informaticslib.ru/ 'Библиотека по информатике'