4.1. Внутренние модели и разум
В разд. 2.1 мы уже имели случай утверждать, что восприятие (в соответствующем глубоком смысле) ориентировано на действие или деенаправлено. В настоящем разделе мы пойдем дальше и допустим, что для сложных систем в изменяющейся обстановке восприятие просто неотделимо от памяти. Восприятие можно тогда рассматривать как синтез частично прогнозирующей внутренней (кратковременной) модели, в построении которой участвует и долговременная память, что позволяет использовать прошлый опыт.
Если я войду в комнату и в глаза мне упадет свет, отраженный от какой-то поверхности (пусть это будет крышка стола), то я пойму, что если ударить в этом направлении кулаком, то рука не пройдет насквозь, послышится глухой звук и в руке возникнет ощущение боли. Однако если мы захотим сконструировать робот, обладающий восприятием, то неожиданно окажется, что подобное восприятие вовсе не так просто, как кажется на первый взгляд. Ведь роботу на основании лишь того, что поверхность отражает свет, придется предсказать, выдержит ли она определенный вес или нет, из какого материала она сделана, каково ее положение относительно эффекторов робота, а также многое другое, помогающее оценить реакцию объекта на контакт с роботом.
Конечно, можно построить дальномер, чтобы машина могла локализовать поверхность (найти, где она находится), но ей нужно еще и "знать", какие различные операции с объектом могут быть уместны. Человек может, взглянув на белую поверхность, сразу понять, что это блюдце с мороженым, а значит, уместное действие состоит в том, чтобы взять ложку и начать его есть. Взглянув на белую поверхность в другой ситуации, он так же быстро сообразит, что это блокнот и что подходящее действие в данном случае - приподнять большим пальцем руки свободный угол верхнего листка, прижимая при этом указательным пальцем соседний участок бумаги, а затем, подтягивая большой палец к указательному, ухватиться за угол листка и, потянув его вверх, оторвать от корешка. Уже само это длинное нудное описание (а таких примеров можно привести сколько угодно) наводит нас на мысль, что машине, хоть в какой-то мере воспроизводящей сложность человеческого поведения, потребуется необъятная библиотека программ, описывающих, что нужно делать в той или иной ситуации.
Дело здесь не только в многочисленности ситуаций, поскольку даже достаточно подробная последовательность действий вроде описанной в последнем примере требует для своей реализации (по крайней мере у животных) определенным образом организованных сокращений миллионов отдельных волокон, входящих в состав мышц, управляющих движениями плеча, локтя, кисти, пальцев и т. д. В разд. 5.5 мы выскажем предположение о том, что эволюция нервной системы носит в определенном смысле иерархический характер и что по мере появления новых уровней в этой иерархии сложные движения и взаимодействия с окружающей средой становятся более подвластны организму. Такие операции, как захватывание предметов большим и указательным пальцем или движение руки в заданном направлении, используются во многих различных сочетаниях, но при этом не приходится обучаться реализации этих основных движений с помощью активности мышечных волокон для каждого отдельного сочетания (впрочем, как показывает изучение мозжечка, возможно, что наиболее тонкому согласованию отдельных элементов все же приходится обучаться для каждого сочетания по отдельности, хотя и на подсознательном уровне). К вопросу об иерархии управления мы еще вернемся в разд. 4.4, где пойдет речь об интегральном роботе.
Независимо от этих тонких деталей реализации ясно, что по мере взаимодействия человека с внешним миром он накапливает обширные знания о таких его аспектах, как использование языка, значение разных выражений лица, назначение орудий труда и построек, которые не "заданы" ему генетически (хотя, как мы увидим в разд. 8.1, возможности для такого накопления могут быть и заданными). Можно сказать, что человек создает свою модель мира, позволяющую ему по частичной информации, приходящей из этого мира, например по свету, отраженному от поверхности стола, предсказывать (с разной точностью, поскольку мы не претендуем на непогрешимость; см. рис. 51) результаты различных взаимодействий с текущей внешней средой, например другую сенсорную информацию, которую можно было бы получить от имеющегося источника стимуляции, скажем ощущение текстуры поверхности стола, если дотронуться до нее пальцами. Очевидно, что для того, чтобы такая "модель" была хоть в какой-то степени полезна, мир, который она моделирует, должен обладать большой "избыточностью". Было бы бесполезно "знать", что все столы, которые нам довелось видеть, твердые на ощупь, если они были твердыми только иногда.
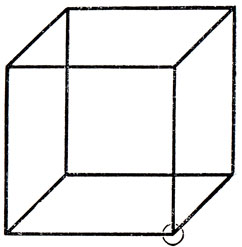
Рис. 51. Куб Неккера. Где находится вершина куба, обведенная кружочком, - ближе к нам или дальше? Посмотрите на рисунок подольше
Нам кажется также, что вся внутренняя активность - за возможным исключением такой абстрактной ее формы, как речевая активность человека, постоянно привязана к тому, что мы называем естественной системой координат действия, а именно к некоторому эталону, связанному с позой и активностью системы, причем управление позой помогает стабилизировать активность, создавая возможность для исследования системой внешней среды с помощью своих рецепторов. Весь репертуар возможных действий системы и возможных вопросов, на которые ей приходится "отвечать", помогает определить наилучшую форму внутреннего кодирования информации. Обзор наших сегодняшних, довольно примитивных представлений о таком кодировании дан в гл. 6.
Все это созвучно с идеями, излагавшимися в разд. 2.1, где мы говорили, что восприятие ищет ответ не столько на вопрос "что?", сколько на вопросы "в какой взаимосвязи?" и "где?". Выделение пространственных отношений из общей совокупности отношений не следует рассматривать как результат волюнтаристской декомпозиции процесса восприятия. Функции восприятия, связанные с вопросом "что делать?", действительно кажутся принципиально иными, нежели функции, связанные с вопросом "где?", и даже управляют этими двумя функциями разные отделы мозга, в чем мы убедимся в разд. 6.3, хотя обе они объединяются в (оперативной) модели.
Главную роль в приобретении любого навыка играет обучение тому, что считать наиболее важной чертой рассматриваемой ситуации. Поэтому можно предположить, что в некоторых случаях при обучении мы, вместо того чтобы выучить структуру сенсорного входа, пытаемся узнать, какой вопрос следует задавать об этой структуре, или, другими словами, на какую ее черту или стимул нужно обратить особое внимание. Например, крыса в лабиринте не просто соотносит свои ответы с предъявляемыми ей стимулами, а осуществляет сложную мышечную деятельность, подвергаясь при этом непрерывной бомбардировке массой сенсорных данных. Крыса может прекрасно помнить, как она добралась до пищи в одном из испытаний, и тем не менее не добраться до нее в следующем, так как не знает, что привело ее к пище - еле уловимый запах, следы на полу, направление, определенная структура мышечной активности или знак на дверце. Поэтому, даже если крыса "прекрасно" запоминает все, что происходит при каждом испытании, может понадобиться множество испытаний, прежде чем она научится не обращать внимания на несущественное и последовательно использовать тот тип примет, который использовал экспериментатор для того, чтобы указать путь к пище. В экспериментах по обучению животных бывают периоды, когда никаких успехов не наблюдается, а затем происходит резкий скачок вверх, как если бы животное напало на новую стратегию или научилось обращать внимание на какую-то важную черту экспериментальной ситуации. Опираясь на эти соображения, можно предположить, что обучение представляет собой процесс накопления, при котором обучаемый экономит время, научаясь применять используемую им стратегию ко все меньшему числу несущественных признаков, синтезировать новые признаки и изменять стратегии. Все, что может указать крысе на то, какой аспект стимулирования является главным, ведет к практически мгновенному обучению - путем направления внимания в нужную сторону, а не путем конкретных указаний о местоположении пищи. Возможно, что именно такой "фокусировкой внимания" и можно объяснить эффект "инъекционного обучения", который, по утверждению некоторых ученых, можно получить, впрыскивая необученному животному экстракт головного мозга обученного. В качестве менее экстравагантного соображения заметим еще, что главная польза от языка заключена в его способности направлять (или отвлекать!) внимание слушателя.
Очевидно, что если система может воздействовать на окружающую среду и добиваться от нее желаемой реакции (например, воздействием может быть смыкание зубов в области пространства, где по данным ваших органов чувств находится красновато-зеленый предмет, а реакцией - кусок яблока у вас во рту), то можно считать, что система "смоделировала" некий аспект этой среды (в нашем случае определила, что яблоко "правильно" расположено в пространстве). Соответствующая модель может быть генетически заложена в мозгу организма или записана в программе робота. Не следует упускать из виду, что плюс к этому системам, взаимодействующим со сложной средой, понадобится и способность изменять эту "модель", включая в нее ранее не учтенные аспекты среды, которые, например, стали существенными лишь за последнее время. По этой причине полезно различать два основных типа моделей. Модели первого типа охватывают взаимоотношения организма с его непосредственным окружением, это кратковременная (оперативная) память (КП) или кратковременная (оперативная) модель (КМ). Например, если речь пойдет о читателе, такая модель может охватывать ваши представления о том, что вы еще не добрались до середины книги, ваше представление о характере комнаты за вашей спиной и сознание, что в течение следующих суток вы договорились встретиться с кем-то в назначенный час и в назначенном месте. Такой памяти можно противопоставить долговременную (или постоянную) память (ДП) или модель (ДМ), в которой заложены постоянные свойства окружающего мира, например способность узнать яблоко, или ездить на велосипеде, или вспомнить подробности вашего дня рождения, когда вам исполнилось шесть лет.
Между прочим, важно различать приобретение навыков, о чем по сути дела и шла речь при обсуждении долговременной памяти, и запоминание событий. Навык может формироваться в результате эволюции или в результате накопления опыта "настройки" сенсомоторной координации, как при вождении автомобиля. Нам хотелось бы подчеркнуть, что в приобретении навыка запоминание событий играет совершенно второстепенную роль аналогично тому, как для шашечного автомата Сэмюэла (разд. 3.4) память на события (т. е. доступ к библиотеке гроссмейстерских партий) играет второстепенную роль по сравнению с возможностью корректировать критические параметры, значения которых отражают кумулятивный эффект игры в целом, а не преимущества или недостатки отдельного хода.
Значение оперативной памяти, которую, как нам хотелось бы подчеркнуть, мы не рассматриваем как аналог "магнитофона" для записи недавних входных воздействий, заключается в том, что она осуществляет синтез (черпая недостающую информацию из долговременной памяти) того пространственнооперационного эталона, на фоне которого рассматриваются все другие события. Благодаря этому система (человек, животное или робот) не привязана в своих действиях к "сиюминутным" сенсорным данным, а может принимать решения, которые в переводе на человеческий язык выглядели бы следующим образом: "Мне нужно быть на работе через 15 минут (КП). В этом автобусе слишком много народа (непосредственная переработка сенсорного входа с помощью долговременной памяти для узнавания толпы и т. п.). Терпеть не могу толкаться в такой толпе (ДП). Лучше пойду пешком (смотрит на часы). Ох, если побежать, то можно успеть на троллейбус (бежит, вскакивает в троллейбус, едет на работу)". Читатель без труда разовьет этот пример, добавив сюда еще несколько скобок. Суть его в том, что наш герой пользовался моделью мира для того, чтобы спланировать свое будущее поведение. Например, в приведенном отрывке в неявном виде сквозила мысль о том, что успеть на работу вовремя более вероятно, если поехать на троллейбусе, чем если пойти пешком.
Слово "модель", которое мы постоянно употребляем, не следует понимать слишком буквально. Мы не столь наивны, чтобы предположить, что, будь у нас возможность заглянуть в кору головного мозга ребенка, мы обнаружили бы там подробную копию мира в целом, а, рассмотрев ее при большом увеличении, нашли бы манекены, изображающие членов его семьи и друзей. Мы просто представим себе нейронную сеть, изменяющуюся под влиянием опыта таким образом, что если последовательность спайков на входе этой сети содержит в себе в закодированном виде некоторый вопрос об окружающем мире, то последовательность спайков на ее выходе будет содержать ответ на этот вопрос, и системе при этом не нужно в промежутке заниматься исследованием реального мира. С течением времени вычислительная машина в нашей голове настраивается таким образом, что наши действия становятся все более приспособленными к целому ряду свойств внешнего мира, помимо тех, которые действуют на наши органы восприятия в данный момент. Иными словами, выражение "модель" в контексте "внутренняя модель мира" нужно понимать в самом абстрактном, а не в конкретном смысле. Мы уже провели различие между ДМ как собственно внутренней моделью мира, в которой собраны его свойства, отражающие наш прошлый опыт в форме, помогающей организовать настоящее поведение и улучшать саму модель, и КМ как одной из внутренних моделей, описывающих текущее "окружение". Мы воспринимаем не только то, что находится у нас перед глазами. Если мы находимся в комнате, то мы воспринимаем свое присутствие в ней вместе со всеми находящимися в ней вещами; это позволяет нам, например, взять предмет, находящийся позади нас, который мы заметили прежде, не отыскивая его вновь. Наше восприятие не сводится к независимой обработке ряда последовательных "моментальных ?снимков" комнаты, а предполагает изначальное осознание самого факта существования комнаты вместе с ее наиболее важными чертами, после чего нам останется только подметить расхождения между нашей моделью и тем, что нам требуется знать о комнате и ее обстановке, для того чтобы "заполнить пробелы" и скорректировать нашу моментальную модель; это произойдет, например, если мы протянем руку назад за нужным предметом и выясним, что кто-то только что сдвинул его с места. Мы хотим еще раз повторить, что все эти процессы моделирования и коррекции закодированы в терминах свойств и поведения нейронов и имеют мало общего с "архивом" в виде моментальных снимков окружающей среды.
В качестве еще одного оправдания нашему выделению пространственных соотношений из числа всех прочих хотелось бы добавить, что мы не пользуемся, как можно было бы подумать, разными моделями для объектов, отличающихся лишь своими размерами и расположением в пространстве. Наши модели, напротив, должны быть достаточно гибкими в том смысле, который подсказывает то, что я назову кассетной метафорой. Рисовать каждый кадр мультипликационного фильма по отдельности слишком непрактично. Поскольку мультфильм может идти целую минуту без изменения "декораций", т. е. фона, на котором происходит действие, такой фон можно нарисовать один раз. Кроме того, на среднем плане может находиться дерево, остающееся в течение определенного периода неизменным, если не считать его расположения относительно других объектов в кадре, и в частности относительно заднего плана - фона. Поэтому его можно нарисовать на отдельном диапозитиве и в каждом последующем кадре при необходимости сдвигать этот диапозитив относительно рамки и, следовательно, относительно фона. Наконец, даже для переднего плана может оказаться возможным нарисовать один раз все те части действующих лиц, которые остаются неизменными, а на отдельных слайдах пририсовывать к ним для каждого кадра положение рук и ног,, выражение лица и т. п. После этого для каждого кадра набирают целую кассету из таких диапозитивов и фотографируют наложенное изображение на экране, причем одна кассета отличается от другой лишь по нескольким параметрам, и число новых рисунков оказывается минимальным.
Аналогичная стратегия весьма экономного описания событий, занимающих достаточно продолжительный отрезок времени, возможно, используется и мозгом, где ДП соответствует "архиву диапозитивов", а КП - каждой новой кассете. В этом случае акт восприятия можно сравнить с использованием сенсорной информации для перестановки диапозитивов, уже имеющихся в кассете, и добавления необходимых слайдов из архива для замены старых или для добавления каких-то новых деталей методом проб и ошибок, с тем чтобы выяснить, не "подходит" ли какой-то новый слайд с точки зрения его соответствия сенсорному входу больше, чем один из старых. Кроме того, часть деятельности организма по изменению своих взаимоотношений с внешней средой можно представить себе как направленную на получение входов, которые позволили бы скорректировать КП в результате предпочтения одних "диапозитивов" другим, а. также скорректировать ПМ путем "исправления" или "редактирования" уже имеющихся слайдов и добавления "совершенно новых".
Вероятнее всего, критерии, заставляющие предпочесть одни "слайды" другим, вырабатываются как в процессе эволюции, так и в процессе индивидуального развития. Например, у вас может быть слайд "колибри", расположенный в кассете так, чтобы это соответствовало расстоянию 10 метров до объекта; вдруг из ДМ "выскакивает" слайд "насекомое" и оказывается,, что если поставить его в кассету на отметку 3 метра, то он будет больше соответствовать сенсорному входу и, следовательно, заменяет старый. В случаях же, подобных кубу Неккера (рис. 51), у нас есть два одинаково хороших "слайда" - один для куба, выступающего верхней гранью вперед, а другой для куба с этой же гранью, уходящей назад, и мы пользуемся то одним из них, то другим, поскольку у нас нет контекста, который подсказал бы, какое из этих представлений следует "оставить".
Сравнение со "слайдами", конечно, неудачно, да и "кассета" - это не коробка, в которую вставляются неподвижные слайды, скорее это скопление нейронов, лежащее на пути каналов, соединяющих сенсорную систему с двигательной. И "вставляя" тот или иной слайд, мы производим операцию, соответствующую активации этой сети, что приводит к возникновению переходных процессов, развивающихся автономно. Организуя поперечные связи, такая "кассета" создает необходимый эталон действия "поза - эффекторы". В связи с этим каждый слайд не ограничивается информацией какой-либо одной модальности, а использует "подсказки" от одного или нескольких органов чувств или от обратной связи двигательной активности для того, чтобы "пробудить" огромный объем мультимодальной информации, направленной на действие. В разд. 6.2 мы попытаемся использовать достоинства кассетной метафоры, не привязывая их к такому понятию, как "слайд", поскольку это могло бы слишком жестко ограничить наши представления о нейронной активности, но сохраняя общие идеи о том, что все тонкие акты восприятия происходят на некотором фоне, что нельзя воспринимать мелкие детали в пустоте и что текущий набор oслайдов весьма сильно влияет на выбор каждого нового слайда. Короче говоря, мы всегда действуем в рамках определенного контекста.
При обсуждении адаптивных систем в разд. 3.4 мы выяснили, что введение процедуры идентификации резко повышает способность управляющего устройства взаимодействовать с внешним миром, если только этот мир обладает определенными свойствами (например, если оценочную поверхность можно считать плоской, как в программе шашечного автомата), т. е. если "внутренняя модель" управляющего устройства с самого начала не вполне "ошиблась адресом". Разовьем это соображение, отметив вместе с Грегори [93], что система, использующая "внутреннюю модель" для того, чтобы извлечь выгоду из временной и пространственной избыточности внешней среды, имеет следующие положительные стороны.
+1. Поскольку описания любых объектов, если, рассматривать их в ограниченном аспекте их возможных взаимодействий, оказываются избыточными, их можно заменить перечислением нескольких ключевых для данного взаимодействия признаков, и стратегия поиска таких признаков помогает сэкономить время при определении взаимодействий с объектами. Для того чтобы распознать конкретные объекты в конкретной ситуации, нам понадобятся даже не все из этих ключевых признаков. В самом деле, поскольку разные сенсорные модальности могут вызывать один и тот же репертуар взаимодействий, искажения некоторых характеристик объекта или их отсутствие "не страшны", если только это не приводит к разрушению "кворума" основных признаков.
+2. Модель является прогнозирующей в том смысле, что наблюдаемые свойства объектов внешней среды могут коррелировать с теми, которые еще предстоит наблюдать, и, что особенно важно, потому, что она может продолжать функционировать даже при временном отсутствии некоторых важных входов; это и происходит, когда вы чихаете за рулем автомобиля или пробираетесь в темноте через знакомую комнату.
+3. Если некая ситуация оказалась подобной другой, для которой такая модель уже была "построена" ранее, то система успешно ведет себя в этой ситуации. Психологи называют этот факт "положительным переносом обучения".
Однако у такой системы есть и свои недостатки.
-1. Если данная ситуация аналогична другой, для которой уже есть подходящая "модель", но отличается от нее некоторыми важнейшими чертами, то "модель" собьет систему с правильного пути - это так называемый "негативный перенос"; например, мы можем уронить очень тяжелый куб, потому что на вид он казался гораздо легче и мы недостаточно напрягли свои мышцы, пытаясь поднять его (рис. 50 гл. 5).
-2. Внутренние модели очень консервативны, отражая скорее прошлое, чем настоящее, и при быстрых изменениях обстановки могут послужить причиной весьма ошибочных суждений.
Первый из отмеченных недостатков напоминает нам о том, что любую систему, которая не может позволить себе отвести достаточно места в своей памяти для всестороннего обследования ситуации или потратить достаточно времени на такое обследование - независимо от того, пользуется она при этом внутренней моделью или нет, - можно "обмануть". Для того чтобы успешно работать, система должна либо сузить диапазон своей активности, избегая нетипичных ситуаций, либо использовать обратную связь, чтобы определять, когда нужно включать новые черты в уже существующую модель (это позволит устранить первый недостаток), например пользуясь тактильными ощущениями для распознавания тяжелого металла в предыдущем примере, или когда нужно вовсе отказаться от прежней модели, в корне пересмотреть ее (это позволит устранить второй недостаток). Как это ни грустно, но приходится согласиться с тем, что если на коррекцию модели затрачивается слишком много времени, то не остается времени, чтобы извлечь из этого пользу, а если слишком мало, то может случиться, что мы будем пользоваться моделью еще долго после того, как она перестанет оправдывать себя.
На основании всех приведенных выше соображений о внутренних моделях нам кажется, что среди свойств, играющих важную роль в разумности поведения, обязательно должны найти себе место следующие.
Существование корректируемой модели мира, обладающей адаптивностью. Для того чтобы действовать разумным образом, система должна не только учитывать свойства своего окружения, но и уметь корректировать свои представления об этих; свойствах, основываясь на новых наблюдениях и изменениях взаимосвязей.
Гибкость и общность. Разумная система должна использовать прошлый опыт не только для адаптивного поведения. Она должна также уметь применять свой прошлый опыт в ситуациях, которые по внешним признакам не похожи на встречавшиеся ранее, например уметь понять, что методы, разработанные для решения одних задач, можно применить и для задач совершенно другого профиля.
Способность к планированию. Разумная система должна использовать свою модель для планирования и оценки альтернативных стратегий поведения, прежде чем она примет одну из них. Для системы переработки символов между планированием и действием нет особой разницы, но для робота или животного это различие вполне реально и имеет очень важное значение; им необходимо распознать пропасть на своем пути и спланировать свои действия так, чтобы не свалиться в нее, а не осознать свою ошибку уже после катастрофы.
История математики напичкана баснями о людях с феноменальными способностями к устному счету, но по всем остальным аспектам интеллекта - значительно ниже среднего уровня. Вычислительную машину, производящую миллионы операций в секунду, следует отнести к той же категории, если ее программа рассчитана лишь на решение арифметических задач, например на обслуживание бухгалтерского учета. Но как мы убедились в гл. 3, возможности вычислительной машины не ограничены бесчисленными повторениями простейших арифметических действий, о чем ярко свидетельствует шашечный автомат Сэмюэла - программа, составленная так, что ее поведение зависит от нескольких параметров, "корректируемых по мере накопления опыта".
Такая программа может в некотором нетривиальном смысле учиться. Но даже если игра в шашки и кажется более интеллектуальным занятием, чем арифметические действия, выполняемые в уме, это все же вполне определенный и единственный навык, и позволительно спросить, в какой степени можно рассчитывать на создание программы, которая сможет справиться с задачами, возникающими в более сложных разнообразных ситуациях. В разд. 4.2 мы займемся изучением одного метода, известного как метод эвристического поиска, который находит себе повсеместное применение в программах такого типа, но это будет лишь частью ответа. Гораздо важнее то, что мы узнаем все больше и больше нового, и это позволяет нам все лучше и лучше понимать природу естественного и искусственного интеллекта, а вовсе не пытаемся найти что-то одно, без чего интеллекта не существует.
|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://informaticslib.ru/ 'Библиотека по информатике'