5.3. Ходьба
Лишь благодаря весьма совершенной "конструкции" нашей двигательной системы большинство из нас с самого раннего детства могут совершенно не заботиться о чисто физических компонентах ходьбы. Описываемый ниже "эксперимент" позволит нам получить некоторое представление о том, что же при этом происходит. (Если у вас нет возможности проделать этот "опыт" немедленно, постарайтесь провести его позже и сравните свои ощущения с тем, что здесь описано.)
Пройдитесь сами и понаблюдайте за ходьбой кого-нибудь другого
I - по ровному месту;
II - по пересеченной местности;
а) с закрытыми глазами;
б) с открытыми глазами;
1) в обычном состоянии;
2) при головокружении;
3) посидев с поджатыми под себя ногами достаточно долго, чтобы ноги онемели.
Попытайтесь описать перемещения центра тяжести тела и всех четырех конечностей в каждом из этих случаев. На основании этого попробуйте прийти к каким-то заключениям об относительной важности зрительной, соместетической, кинестетической и вестибулярной информации. А как при этом воспринимаются расположенные поблизости предметы? Для того чтобы перепробовать все варианты, может потребоваться слишком много времени, но попытайтесь провести по крайней мере некоторые из них.
Это было первое задание по курсу, который я читал в Стэнфордеком университете зимой 1969 г. Следующий абзац заимствован из ответов студентов.
"Я иду по ровному месту. Глазами ищу препятствия. Я чувствую (а точнее, ощущаю результаты) движение своих мышц, но не осознаю, что даю им команды двигаться. Я осознаю лишь свое желание идти. Я размахиваю руками примерно синхронно движению контралатеральной ноги. По-видимому, я слегка покачиваюсь из стороны в сторону, когда переношу вес тела с одной ноги на другую. И перемещаясь от одной точки опоры до Другой, я ощущаю плавное движение, сопровождающееся автоматической работой мышц".
Усредненные ответы студентов сведены в табл. 1. Обратите внимание, что комбинацию "затекшие ноги" и "головокружение" было не только сложно создать, но в тех редких случаях, когда такое состояние удавалось вызвать, оно делало человека почти совершенно беспомощным.
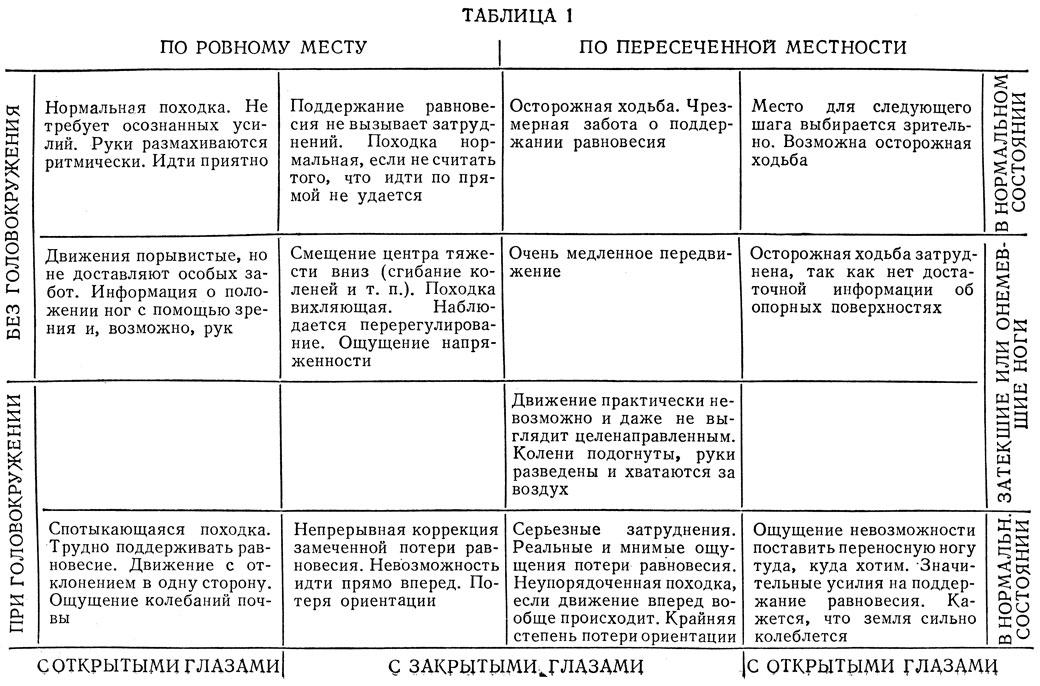
Таблица 1
Читатель, возможно, уже понял, что существует не только множество различных способов описывать ходьбу, но и много разных видов ходьбы. Для того чтобы упростить дело, примем, что существует некий основной набор рефлексов, которые можно вызывать и видоизменять в зависимости от конкретных условий. Наиболее важным из этих рефлексов является шагательный (рис. 90); он наблюдается даже у младенцев в первые месяцы их жизни. Этот рефлекс приводится в действие подсознательно всякий раз, когда проекция центра тяжести человека находится впереди границы опорного поля. А это позволяет нам рассматривать ходьбу по ровному месту как процесс перемещения центра тяжести тела вперед путем осуществления шага- тельного рефлекса одной ногой и повторения этого процесса в зеркальном отображении. Такое описание ходьбы не должно означать, что мы недооцениваем сложность этого процесса; основная его идея состоит в том, что, хотя связанная с ходьбой мышечная активность весьма сложна, соответствующие расчеты, производимые на высшем уровне, вовсе не обязательно должны быть тоже сложными.
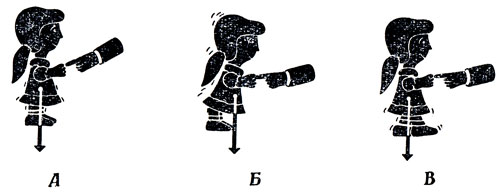
Рис. 90. Шагательный рефлекс. Если девочку потянуть вперед так, что центр тяжести ее тела смещается и его проекция оказывается впереди ног (Б), то для восстановления равновесия она сделает шаг вперед' после чего проекция силы тяжести окажется между ступнями (В)
Нормальная ходьба представляет собой последовательность неустойчивых состояний, хотя в динамическом смысле эта система вполне устойчива. Попытаемся разобраться в этом с точки зрения теории управления (разд. 3.3). Будем рассматривать опорно-двигательный аппарат как объект управления, а работу мышц, нервных клеток и рефлексов - как управляющее устройство. Всякий, кто когда-либо испытал сильное головокружение, знает, что при этом тело без посторонней помощи может в лучшем случае находиться в состоянии неустойчивого равновесия, т. е. без известных мышечных усилий человек просто упадет. Таким образом, управляющее устройство должно либо компенсировать отклонение от состояния равновесия (например, путем стабилизации позы, если мы хотим стоять на месте), либо использовать отклонение от равновесия для того, чтобы заставить тело перейти в новое состояние равновесия, совершив при этом необходимый перенос (например, создавая движение путем плавной последовательности изменений позы).
Этого, по-видимому, достаточно для краткого описания "нормальной" ходьбы на ровном месте при ярком дневном свете. Имеются и другие типы ходьбы, и среди них "осторожная ходьба", к которой прибегают, если надо идти в темноте по загроможденному препятствиями месту. Такая ходьба представляет собой как бы последовательность статистически сбалансированных положений. При этом даже тогда, когда переносная нога приподнята и вынесена вперед, центр тяжести не переносится и остается над опорной ногой. Это позволяет идущему не переносить вес тела на переносную ногу до тех пор, пока он не "проверит" опорную поверхность под нею, поворачивая стопу в голеностопном суставе и производя давление на пятку. Если опора кажется надежной, вес тела переносится на "ощупывающую" дорогу ногу, и описанный процесс повторяется, но только для другой ноги.
Здесь полезно отметить, что если при нормальной ходьбе мы широко и уверенно пользуемся имеющейся у нас моделью непосредственно окружающего нас мира и с ее помощью можем организовать управление упреждающего типа (т. е. мы надежно предсказываем, где найдет опору наша нога, не занимаясь в явном виде проверкой правильности этого прогноза), то при "осторожной" ходьбе каждый шаг зависит от полученной по каналам обратной связи информации о том, куда же на самом деле ступила нога. Читатель оценит реальность такого различия, вспомнив все неприятности, которые приходится испытать, когда положенный в основу "упреждающего управления" прогноз оказывается неверным (например, когда мы ошибаемся в числе ступенек на лестнице). В средние века этот психологический эффект учитывался при постройке замков: последняя верхняя ступенька лестницы отличалась от остальных по высоте; это увеличивало шансы на то, что ворвавшийся в замок рыцарь оступится и беспомощно растянется на лестнице во всех своих доспехах!
Если попробовать формализовать все эти соображения, построив соответствующую блок-схему, мы сразу почувствуем всю скудность этих нескольких прямоугольников, соединенных между собой линиями. Даже самые закоренелые сторонники использования теории управления не могут не почувствовать некоторую неловкость при виде блока с надписью "Зрение", из которого выходит всего одна линия; именно эту неловкость мы постараемся смягчить в следующем разделе. В том, что человек идет по прямой, видимо, играет роль вестибулярный аппарат и зрение. Зрительный вход позволяет управлять нашими движениями с гораздо большей точностью, но при головокружении даже зрение не может помочь нам держаться прямо. На рис. 91 мы попытались отразить логику нашего поведения при ходьбе на ощупь. Читателю может быть интересно сравнить эту схему с построением системы управления из блоков ПВПВ (разд. 4.2).
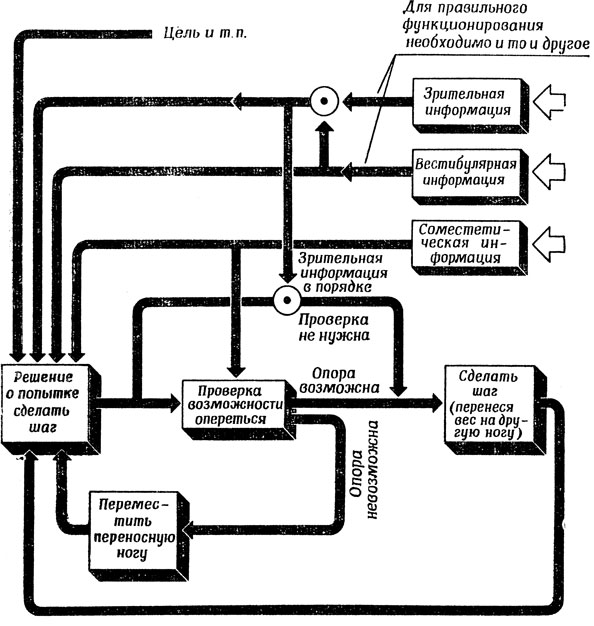
Рис. 91. Логическая схема 'осторожной' ходьбы. Мы уверенно шагаем вперед или осторожно пробираемся к цели в зависимости от того 'можем ли мы на основе зрительной информации быть уверены в том, что переносная, нога найдет надежную опорную поверхность
Можно также попытаться представить себе, что человек пользуется какой-то внутренней моделью окружающего мира, позволяющей ему (в течение некоторого времени после того, как он закроет глаза) уверенно обходить препятствия. Наконец, создается впечатление, что объем необходимых вычислений и объем и роль осознанных действий значительно возрастают по мере того, как мы "выводим из строя" различные блоки нашей системы. И если бы нам удалось придать этим впечатлениям количественный характер, мы смогли бы лучше разобраться в функциях различных рецептивных систем.
Несмотря на то что выше мы рассматривали лишь ходьбу" человек может передвигаться и другими аллюрами. Для того чтобы понять, как мало осознанного управления требуется для реализации весьма сложных движений, я рекомендую читателю попробовать пройтись "галопом" или "прыжками". Начать двигаться этими аллюрами немного затруднительно, но вскоре они кажутся совершенно естественными. Внутренняя организация нашей системы управления движениями рассчитана также и на передвижение "на всех четырех"; в этом нетрудно убедиться" попробовав ползать с разной скоростью, причем оказывается" что при разной скорости движения фазовый сдвиг между движениями рук и ног изменяется.
Приведенные выше соображения, естественно, не претендуют на то, чтобы рассматривать их как строгий анализ процессов передвижения на двух ногах (см., например, гл. III монографии Бернштейна [24]). Мы лишь хотели помочь читателю представить рассуждения о контурах обратной связи и иерархической структуре управления движением в правильном свете" четко объяснив, что человек не может сознательно управлять каждым мышечным волокном через импульсацию определенной структуры и что если какой-то из каналов обратной связи выходит из строя, его можно заменить другим (если нет возможности ощупать субстрат ногой, можно посмотреть на него; если нельзя увидеть, можно слушать отражение звука (эхо) от больших объектов и т. п.). Наконец, управление высокого уровня" по-видимому, освобождено от прочих забот для того, чтобы иметь возможность решать широкие стратегические вопросы или руководить тонкими деталями действий, а плавность и согласованность нашей двигательной активности обеспечивают системы промежуточного уровня. Сопоставление этих общих соображений с анатомическими деталями, с которыми познакомились в разд. 5.2, остается открытой проблемой, привлекающей к себе в последнее время все больше внимания.
|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://informaticslib.ru/ 'Библиотека по информатике'